Appendix E
Miscellaneous derivations
E.1. Relation between the areas of the faces of a
tetrahedron
 For the tetrahedron shown in the
figure, we prove that:
For the tetrahedron shown in the
figure, we prove that:
where is the area of the face with normal n, and is the face with normal
Note that
Note also that we
can compute the area of the face with normal n by taking cross products of the vectors defining the sides of the
face:
so that
as required.
E.2. Relation between area elements before and after deformation
Consider an element
of area with normal in a deformable solid, as shown below.
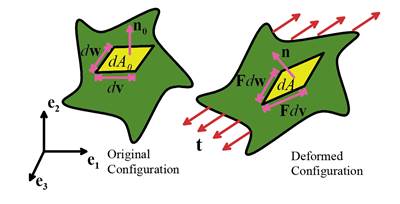
Suppose the solid is
deformed by subjecting it to some loading, and let denote the components of the deformation
gradient tensor field in the solid. The area element deforms with the solid,
and has a new area and normal n, as shown in the figure.
We plan to prove that the deformed area element is related to its
undeformed area through
where
Start by noting that
the area before deformation can be computed by taking the
cross product of two infinitesimal vectors bounding the area element in the undeformed
configuration
Note that the
infinitesimal vectors map to , in the deformed configuration. Therefore the area after deformation is given
by
Let denote the inverse of the deformation gradient
tensor, i.e. . Then, we could
write
Now, recall the identity
so that
where , giving the
required result.
E.3. Time derivatives of integrals over volumes within a deforming solid
Consider the
deformable solid sketched below.

Let denote the mass density of the solid in the
original configuration, and let denote the mass density in the deformed
configuration. (Both and can vary with position in the solid). Let denote a closed region within the undeformed
solid, and let V be the same region of the solid in
the deformed configuration. Suppose that
denotes the velocity field within the body. We shall show that
and also that
At first glance, this looks obvious why not just take the derivative under the
integral sign? You can’t do this,
however, because the volume V changes
with time, as the solid is deforming. In
addition, the mass density varies with time, because of the deformation, so
even if we could take the time derivative under the integral, we’d end up with
an additional term. To do the derivative properly, we first need to change
variables so the integral is evaluated over the undeformed volume (which is independent of time). Thus
where
and we have recalled a result from the Kinematics section
Now, we can happily
differentiate. The mass density in the
undeformed configuration does not vary with time, so that
The last expression was obtained by changing variables in the
integral back to the deformed configuration.
This is the first result we wanted.
To show the second result, follow exactly the same procedure,
until you obtain
Now, observe that
(the cross product of two parallel
vectors is zero) so substituting this into the preceding equation and changing
variables in the integral as before gives the required result.
E.4. Time Derivatives of the Curvature Vector for a Deforming Rod
Consider a deforming rod, as shown below.

· Let denote arc-length coordinate of a material
particle on the axis of the undeformed rod;
· Let denote the arc-length coordinate of this
particle after deformation.
· Define basis vectors attached to the deformed rod, following the
convention described in Section 10.2.
· Define an angular velocity vector and curvature vector through
We shall show that the gradient of the angular velocity
vector characterizing the rotation of the rod’s cross-section is related to the
time derivative of the curvature vector by
To see this, start by differentiating the definition of the
angular velocity vector with respect to arc length
and, similarly, differentiating the definition of the
curvature vector with respect to time
where with held fixed. The preceding two results show
that
Next, note that we can expand the triple cross-products (see
Appendix A) as
Hence, we conclude that
This result must hold for all three vectors , and therefore
as stated.
