10.2 Motion and Deformation
of slender rods
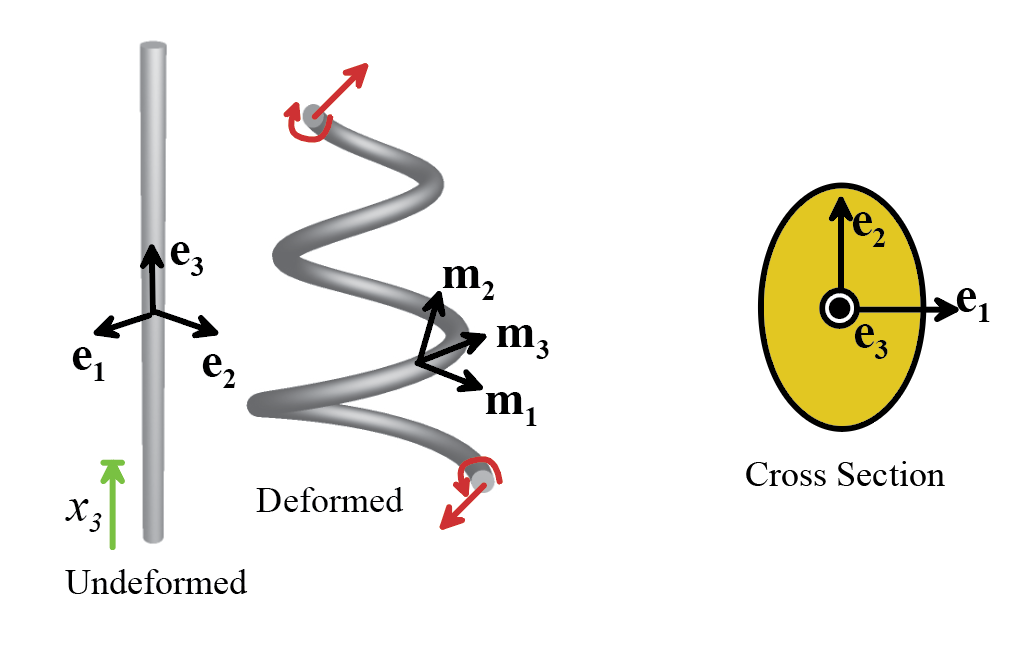
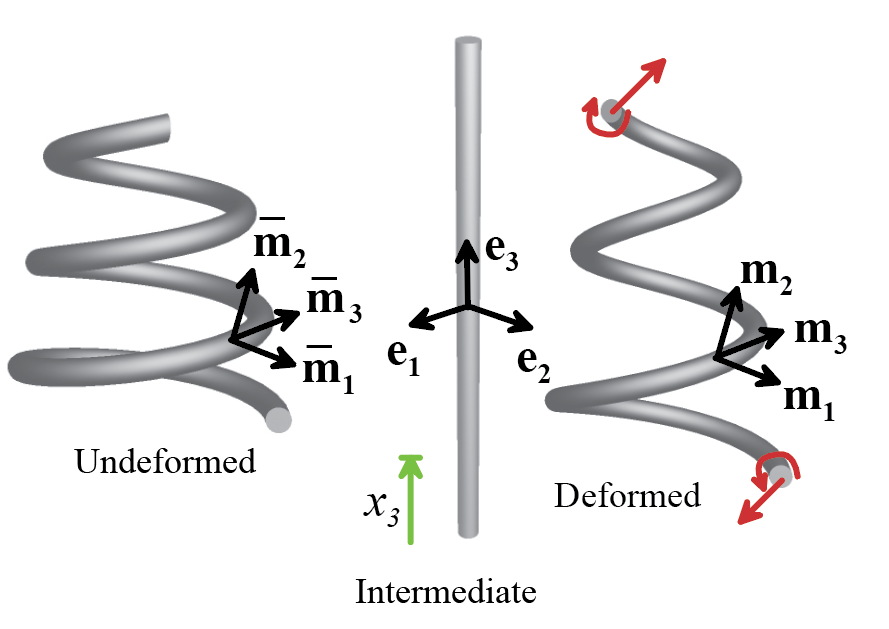
The figure below illustrates the
problem to be solved. We suppose that a
long, initially straight rod with length is subjected to forces and moments that cause
it to stretch to a new total length L,
as well as to bend and twist into a complex three dimensional shape, which we
wish to determine. The initial shape
need not necessarily be stress free.
Consequently, we can solve problems involving a rod that is bent and
twisted in its unloaded configuration (such as a helical spring) by first mapping
it onto an intermediate, straight reference configuration, and then analyzing
the deformation of this shape.
10.2.1 Variables characterizing the
geometry of the rod’s cross-section
The figure above illustrates a
generic cross-section of the (undeformed) rod. We will characterize the shape
of the cross-section as follows:
1. We introduce three
mutually perpendicular, unit basis vectors , with pointing parallel to the axis of the
undeformed cylinder, and parallel to the principal moments of area of
the (undeformed) cross section.
2. We introduce a coordinate system within the cross section, with origin at the
centroid of the cross-section.
3. The cross-sectional area of the rod
is denoted by
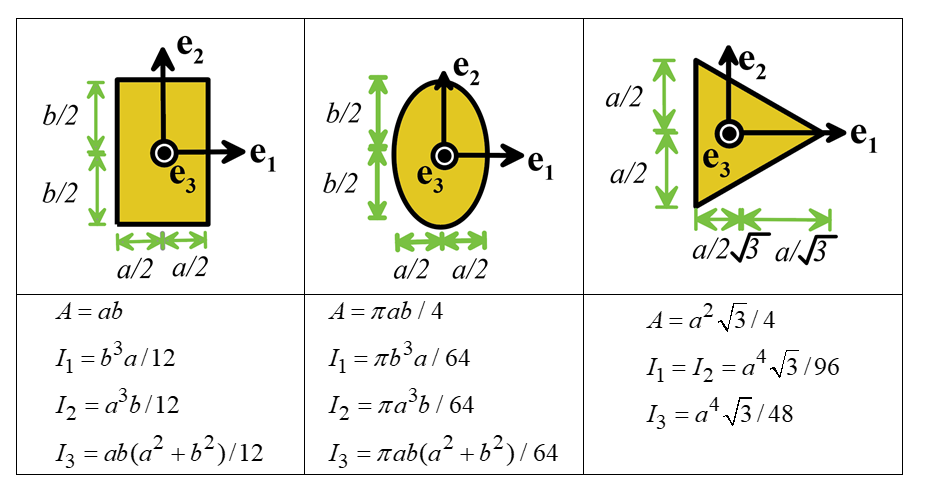
4. The principal moments of area of the
cross-section are defined as
5. We define a moment of area tensor H for the cross-section, with
components , , and all other components zero.
6. In calculations to follow, it will be
helpful to note that, because of the choice of origin and coordinate system,
Principal moments of area and their
directions are listed for a few simple geometries in the table below. Recall also that area moments of inertia for hollow sections can be calculated by
subtraction.
10.2.2 Coordinate systems and variables characterizing the deformation of
a rod
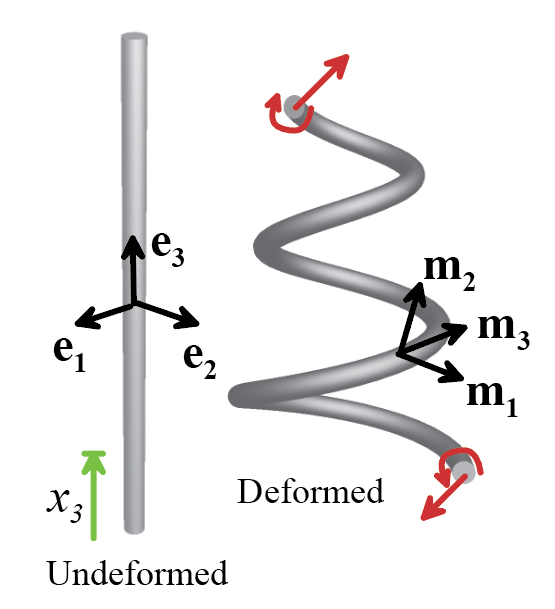 A generic twisted rod is illustrated
in the figure. The deformation of the
rod is described as follows:
A generic twisted rod is illustrated
in the figure. The deformation of the
rod is described as follows:
· The orientation of the straight rod
is characterized using the basis described in the preceding section.
· The position vector
of a material particle in the reference configuration is , where corresponds to the centroid of the cross
section, and is the height above the base of the cylinder.
· After deformation, the axis of the
cylinder lies on a smooth curve. The point that lies at in the undeformed solid moves to a new
position after deformation.
· The orientation of the cross-section
after deformation will be described by introducing a basis of mutually
perpendicular unit vectors , chosen so that is parallel to the axis of the deformed rod,
and is parallel to the line of material points that
lay along in the reference configuration (or, more
precisely, parallel to the projection of this line perpendicular to ). Note that the
three basis vectors are all functions of , and if the rod is
moving, they are also functions of time.
· The orientation of can be specified by three Euler angles , which characterize
the rigid rotation that maps onto . To visualize the significance of the three
angles, note that the rotation can be accomplished in three stages, as shown below: (i) rotate the basis vectors through an
angle about the axis.
This results in a new set of vectors ; (ii) Rotate these
new vectors through an angle about the axis.
This rotates the vectors onto a second configuration ; (iii) finally,
rotate these vectors through angle about the direction, to create the vectors.
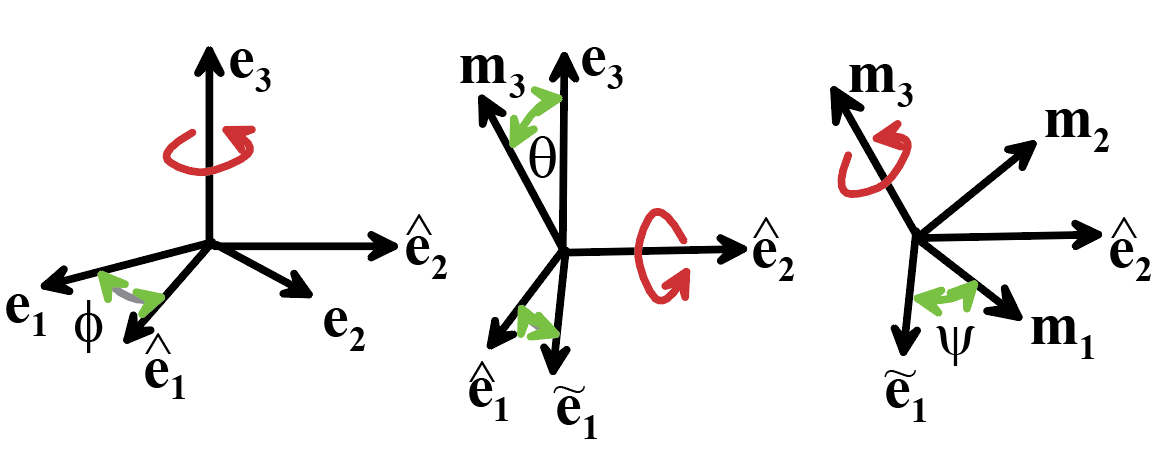
· Relationships
between the Euler angles and the curve characterizing the axis of the rod will
be given shortly: these results will show that the angles and can be determined from the shape of the
axis. The angle is an independent degree of freedom, and quantifies
the rotation of the rod’s cross-section about its axis.
· We let denote the arc length measured along the axis
of the rod in the deformed configuration.
· The velocity of the rod is
characterized by the velocity vector of its axis,
· The rate of rotation of the rod is
characterized by the angular velocity of the basis vectors .
It will be shown in Sect 10.2.3 that the angular velocity can be related
to the velocity v of the bar’s axis
and its twist by
· The acceleration of the rod is
characterized by the acceleration vector of its axis,
· The angular acceleration of the rod
is characterized by the angular acceleration of the basis vectors. It will be shown below that the angular acceleration
can be related to the acceleration a
and velocity v of the bar’s axis and
its twist by
10.2.3 Additional deformation measures and useful kinematic relations
In this section we introduce some
additional measures of the deformation of the rod, as well as several useful relations
between the various deformation measures.
· The curve corresponding to the axis
of the deformed rod is often characterized by its tangent, normal and binormal vectors, together with its curvature, and its torsion. These are defined
as follows.
1. The tangent vector
2. The normal vector and curvature
are defined so that
,
where n is a unit vector
3. The binormal vector is
defined as
4. The triad of unit vectors defines the Frenet Basis for the curve
5. The torsion of the curve is
defined as .
Note that the torsion is simply a geometric property of the curve it is not necessarily related to the rod’s
twist.
These variables are not sufficient to
completely describe the deformation, however, since the twist of the rod can
vary independently of the shape of its axis.
· The two bases , can be related in terms of the Euler angles as
follows.
These results can be derived by
calculating the effects of the sequence of three rotations. Note also that since both sets of basis
vectors are triads of mutually perpendicular unit vectors, they must be related
by
where is a proper orthogonal tensor that can be
visualized as a rigid rotation. The
rotation tensor can be expressed in several different forms:
1. It can be expressed as the sum of
three dyadic products
2. It can be expressed as components in
either or , which can be
written in dyadic notation as or . Surprisingly, the components both bases are
equal, and are given by . The components can
be expressed in terms of the Euler angles as a matrix

· In further calculations the variation
of basis vectors with distance s along the deformed rod will play a central role. To visualize this quantity, imagine that the
basis travels up the deformed rod. The basis vectors
will then rotate with an angular velocity that depends on the curvature and
twist of the deformed rod, suggesting that we can characterize the rate of
change of orientation with arc-length by a vector , analogous to an angular velocity
vector. The curvature vector can be expressed
as components in the basis as .
This vector has the following properties
1. The curvature vector is (by
definition) related to the rate of change of
with s by
which can be expanded out
to show that
2. The components quantify the bending of the rod, and are
related the curvature and the binormal vector of the curve traced by the axis of the
deformed rod by .
You can show this result by comparing the formula for with the formula for b.
3. The curvature vector can also be
expressed in terms of the position vector of the rod’s centroid as
The component of curvature cannot in general be expressed in terms of r, because the rotation of the rod’s
cross-section about its centroid axis may provide an additional, independent
contribution to .
For the special case where and are everywhere parallel to the normal vector n and binormal b, respectively, it follows that .
In this case, is equal to the torsion of the curve.
· The rate of change of with distance s can also be expressed in terms of the Euler angles. For example, the derivative of can be calculated as follows
Similar results for and are left as exercises.
· The bending curvatures and the twist rate are related to the Euler angles by
These results can be derived from the
two different formulas for , together with the equations
relating and in terms of the Euler angles.
· The arc length s along the rod’s centerline is related to the position vector of
the rod’s axis by
· Some relationships between the time derivatives of these
various kinematic quantities are also useful in subsequent calculations. The rate of change in shape of the rod can be
characterized by the velocity of the axis and the time rate of change of the cross-sectional
rotation .
· The time derivative
of the tangent vector is a convenient way to characterize the rate of change of
bending of the rod. This is related to
the velocity of the rod’s centerline by
If we express the velocity in components and recall we can write this as
It is important to note that the components are not equal to
the time derivatives of the components of the tangent vector t, because the basis varies with time.
· The time derivatives
of the basis vectors can also be quantified by an angular velocity vector , which satisfies . The components
of are readily shown
to be
· The time derivatives of the remaining basis vectors follow
as
· The time derivative of the arc length of the centerline is
related to its velocity as follows
· We shall also require the gradient of the angular
velocity , which quantifies
the rate of change of bending. We give this vector the symbol to denote its physical significance: it can be
interpreted (see Appendix E) as the co-rotational time derivative of the
curvature vector, as follows
Evaluating the
derivatives of shows that
The co-rotational
time derivative of curvature must be used to quantify bending rate (instead of the
time derivative ) to correct for the fact that rigid rotations and pure
stretching do not change bending.
· Finally, to solve dynamic problems, we will need to be
able to describe the linear and angular acceleration of the bar. The linear acceleration is most conveniently characterized
by the acceleration of the centerline of the bar
· The angular acceleration of the bar’s cross-section can
be characterized by the angular acceleration of the basis vectors . A straightforward calculation shows that
· The second time derivative of the basis vectors can then
be calculated as
10.2.4 Approximating the displacement, velocity and acceleration in the
rod
The position vector after deformation
of the material point that has coordinates in the undeformed rod can be expressed as
This is a completely general
expression. We now introduce a series
of approximations that are based on the assumptions that
1. The rod is thin compared with its
length;
2. The radius of curvature of the rod
(due to bending) is much larger than the characteristic dimension of its cross
section;
3. The rate of change of twist of the
rod has the same order of magnitude as the bending
curvature of the rod.
4. The material in the
rod experiences small distorsions i.e. the change in length of any infinitesimal
material fiber in the rod is much less than its undeformed length.
With this in mind, we assume that can be approximated by a function of the form
where the Greek indices can have values 1 and 2, and can be regarded as the first term in a Taylor
expansion of . The definition of requires that . We assume in addition that
for all possible choices of .
The constants can be thought of as the components of a
homogeneous in-plane deformation applied to the cross section, while the
function describes the warping of the cross-section.
To decouple the warping from the axial displacement of the rod, we require
that
In addition, for small distorsions,
the deformation must satisfy and , the rod curvatures must satisfy for all , and the variation of arc-length s along the axis of the deformed rod
with must satisfy .
The velocity field in the bar can be approximated as
where it has been assumed that and for all .
Finally, the acceleration field within the bar will be
approximated as
Here, all time derivatives of and have been neglected. This is not so much because they are small,
but because they represent a crude approximation to the distortion of the
cross-section. The time derivatives of
these quantities are associated with short wavelength oscillations in the bar,
which cannot be modeled accurately using the approximate displacement
field.
10.2.5 Approximating the deformation gradient
Based on the assumptions listed in
Section 10.2.3, the deformation gradient in the rod can be approximated by
The first three terms in this
expression quantify the effects of axial stretching, bending and twisting of
the rod. The last two approximate the
distorsion of its cross-section.
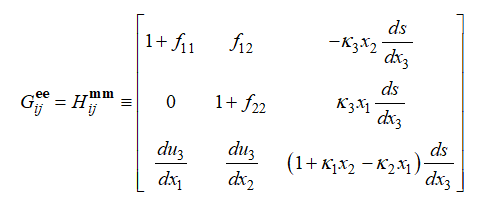
The deformation gradient can also be decomposed as
where R is the rigid rotation satisfying , and G and H are deformation
gradient like tensors that describe the change in shape of the rod. These tensors are most conveniently expressed
as components in and , respectively we can represent this in diadic notation as or . The components can be expressed in matrix
form as
Derivation: The
deformation gradient is, by definition, the derivative of the position vector
of material particles with respect to their position in the reference
configuration, i.e.
To reduce this to the expression given,
1. Note that
2. Recall that
3. Substitute and neglect the derivatives of f and with respect to
The decomposition follows trivially by substituting into the dyadic representation of F and rearranging the result. A similar approach gives .
10.2.6 Other strain measures
It is straightforward to compute additional strain measures
from the deformation gradient. Only a
partial list will be given here.
1. The determinant of the deformation gradient
follows as
2. The components of the left and right Cauchy-Green tensors can be computed from and , where G and H were defined in 10.2.4. C and B are most conveniently expressed as components in and , respectively we can represent this in diadic notation as or . For small
distorsions, the result can be approximated by

3. The Lagrange strain is
defined as . Its components follow trivially from the
preceding formula. Note that the matrix
of components for E resembles the formula for the
infinitesimal strain components in a straight bar subjected to axial
stretching, bending and twist deformation.
However, if the bent rod does not
lie in one plane, the twisting measure includes contributions from both the rotation
of the rod’s cross section about its axis, and also from the bending of the
rod.
4. The rate of
deformation tensor will also be
required. It is simplest to calculate the velocity gradient by differentiating the expression given for
the velocity vector in the preceding section.
Substitute , and note that
Evaluating then shows that the components of D in are
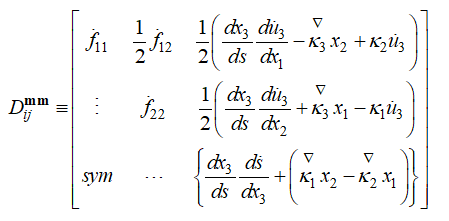
to within second order terms in
curvature, and .
10.2.7 Kinematics of rods that are bent and twisted in the unstressed
state
It is straightforward to generalize
the results in sections 10.2.3-10.2.5 to calculate strain measures for rods
that are not straight in their initial configuration, as shown below.
In this case we must start by
describing the geometry of the undeformed rod.
To this end
1. We denote the distance measured along
the axis of the initial, unstressed, twisted rod by
2. At each point on the initial rod, we introduce a set of
three mutually perpendicular unit vectors , where is chosen to be tangent to the axis of the
undeformed rod; while are parallel to the principal moments of
inertia of the cross-section.
3. We also introduce an arbitrary Cartesian basis
where the unit vectors denote three fixed
directions in space.
4. The basis vectors and together define a set of three Euler angles , which completely describe the shape
of the undeformed rod.
5. We define a rotation tensor satisfying that characterizes the orientation of with respect to .
The components of can be found using the formulas in Section
10.2.3.
6. We define three curvature components that characterize the bending and twisting of
the initial rod, as follows
The deformed shape of the rod is
characterized exactly as described in Section 10.2.1, except that the axial
distance is replaced by the arc-length of the undeformed rod.
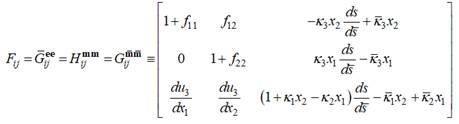
Assuming small distorsions, the
deformation gradient can be expressed in dyadic notation as , where the coefficients are given below. The deformation gradient can also be
decomposed into two successive rotations and a small distorsion
where the rotation tensors and satisfy , and the tensors can be expressed in component form as .
Their components are given by
The deformation gradient can be
written down immediately, by mapping the initial rod onto a fictitious
intermediate configuration in which the rod is straight, chosen as follows:
1. The straight rod has axis parallel to
the direction
2. The point at arc-length in the unstressed rod has coordinates in the intermediate configuration.
3. The principal axes of the cross
section are parallel to in the intermediate configuration
4. The cross-section of the rod has the same
shape in the intermediate configuration as in the undeformed configuration.
The deformed state can be reached in
two steps (i) Deform the rod from the unstressed configuration to the
intermediate configuration, with a deformation gradient .
The components of can be calculated as the inverse of the
deformation gradient that maps the intermediate straight rod onto the
undeformed shape. (ii) Deform the rod
from the straight configuration to the deformed configuration, with a
deformation gradient .
The total deformation gradient follows as .
10.2.8 Representation of forces and moments in slender rods
 The figure shows a generic cross-section of the rod, in the deformed
configuration. To describe measures of internal and external force acting on
the rod, we first define a basis , with the unit vectors chosen using
the scheme described in 10.2.2. We then
define the following vector components in this basis:
The figure shows a generic cross-section of the rod, in the deformed
configuration. To describe measures of internal and external force acting on
the rod, we first define a basis , with the unit vectors chosen using
the scheme described in 10.2.2. We then
define the following vector components in this basis:
· The body force acting on the rod . For simplicity, we shall assume that the body
force is uniform within the cross section (but may vary along the length of the rod).
· The tractions acting on the exterior
surface of the rod
· The Cauchy stress within the rod .
External forces and moments acting on the rod
are characterized by
1. The force per unit length acting on
the rod, .
The force components can be calculated from the tractions and body force
acting on the rod as
2. The moment per unit length acting on
the rod, .
The moment components can be
calculated from the tractions acting on the exterior surface of the rod as as
3. The resultant force acting on each
end of the rod. Each force can be
expressed as components as .
The components are related to the tractions acting on the end of the rod
by , where the area integral is taken
over the cross section at the appropriate end of the rod.
4. The resultant moment acting on each
end of the rod. Each moment can be
expressed as components as .
The components are related to the tractions acting on the end of the rod
by
Internal forces and moments
in the rod are
characterized by the following quantities:
1. The variation of internal shear
stress in the cross section
2. The average in-plane stress
components
3. Three components of a vector bending moment,
defined as
4. The axial force on the cross-section
5. Two additional generalized forces , which represent the transverse
shear forces acting on the rod’s cross section.
Unlike the axial force, however, these forces cannot be directly related
to the deformation of the rod. Instead,
they are calculated from the bending moments, using the equilibrium equations
listed in the next section.
The forces and moments define components of a vector force and moment
1. is the resultant force acting on an internal cross-section
of the rod;
2. is the resultant moment (about the centroid of
the cross section) acting on the cross-section.
10.2.9 Equations of motion and boundary conditions
The internal forces and moments must satisfy the equations of
motion
Here, , T and M are the internal
forces and moments in the rod; are the external force and couple per unit
length; is the mass density of the rod; A is its cross-sectional area, H is the area moment of inertia tensor
defined in Sect 10.2.1, while are the acceleration, angular velocity and
angular acceleration of the rod’s centerline, respectively. The two equations
of motion for T and M clearly represent linear and angular
moment balance for an infinitesimal segment of the rod.
The equations of motion for T and M are often expressed
as components in the basis, as
Note that:
1. If the system is in static
equilibrium, the right hand sides of all the equations of motion are zero.
2. In addition, in many dynamic
problems, the right hand sides of the angular momentum balance equations may be
taken to be approximately zero, since the area moments of inertia are small. For example, the rotational inertia may be
ignored when modeling the vibration of a beam.
The rotational inertia terms can be important if the rod is rotating
rapidly: examples include a spinning shaft, or a rotating propeller.
Boundary Conditions: The internal stresses, forces and moments must satisfy
the following boundary conditions
1.
2. on C
3. The ends of the rod may be subjected
to a prescribed displacement.
Alternatively, the transverse or axial tractions may be prescribed on
the ends of the bar: in this case the internal forces must satisfy for and for s=0.
4. The ends of the rod may be subjected
to a prescribed rotation. Alternatively,
if the ends are free to rotate, the internal moments must satisfy for and for s=0.
Derivation:
Measures of internal force and the equilibrium equations emerge naturally from
the principle of virtual work, which states that the Cauchy stress distribution
must satisfy
for all virtual velocity fields and compatible stretch rates .
The virtual velocity field and virtual stretch rates in the bar must
have the same general form as the actual velocity and stretch rates, as
outlined in Section 10.2.4 and 10.2.5. The
virtual velocity and stretch rate can therefore be characterized by and compatible sets of .
This has two consequences:
· The virtual work principle can be expressed
in terms of the generalized deformation measures and forces defined in the
preceding sections as
· If the virtual work equation is satisfied
for all and compatible sets of , then the internal forces and
moments must satisfy the equilibrium equations and boundary conditions listed
above.
It is straightforward to derive the
first result. The Jacobian is
approximated as ; the components of follow from the formulas given in Section
10.2.6, and the velocity field is approximated using the formula in 10.2.5. Substituting the definitions given in Section
10.2.7 for generalized internal and external forces immediately gives the
required result. The algebra involved is
lengthy and tedious and is left as an exercise.
The equilibrium equations and
boundary conditions are obtained by substituting various choices of and compatible sets of into the virtual work equation.
1. Choosing reduces the virtual work equation to
The condition follows immediately.
2. Choosing reduces the virtual work equation to
Recall that (by definition) must be chosen to satisfy
Since the body force is uniform, the
term involving is zero.
The first integral can then be integrated by parts as follows
Choosing to vanish on the boundary or the interior yields
the equilibrium equation
choosing any other gives the boundary condition .
3. Choosing , using as well as yields
where we have integrated by parts to
obtain the second line. Choosing to vanish on the ends of the rod yields the
equation of motion . Any other choice of yields the boundary conditions on the ends of the rod.
4. Choosing and substituting , , where are the components of a virtual rate of change
of the tangent vector reduces the virtual work equation to
To proceed, it is necessary to
express and in terms of the virtual velocity components . The algebra and the resulting
equilibrium equations are greatly simplified if the tangent vector is regarded as an independent kinematic variable. The relationship between t and must be enforced by a vector valued Lagrange
multiplier , which must satisfy
for all variations . The second integral can be
expressed in component form as
This equation can simply be added to
the virtual work equation to ensure that and are consistent. Finally, recall that the curvature rates and
stretch rate are related to by
Substituting these
results into the augmented virtual work equation gives
This equation must be satisfied for
all admissible . Considering each component in turn,
and integrating by parts appropriately and using gives the last five equations of motion, as
well as the boundary conditions on s=0
and s=L.
10.2.10 Constitutive equations relating forces to deformation measures in
elastic rods
Constitutive equations must relate the deformation measures
defined in Section 10.2.3 to the forces defined in 10.2.8. In this section we list the relationships
between these quantities for an isotropic, elastic rod that is subjected to
small distorsions. For simplicity, the
sides of the rod are assumed to be traction free.
The results depend on the geometry of the rod’s
cross-section, which is characterized as follows.
1.  Introduce a Cartesian coordinate
system as shown in the figure. The coordinates have
origin at the centroid of the cross-section, with basis vectors parallel to the principal axes of inertia for
the cross-section, and parallel to the rod’s axis.
Introduce a Cartesian coordinate
system as shown in the figure. The coordinates have
origin at the centroid of the cross-section, with basis vectors parallel to the principal axes of inertia for
the cross-section, and parallel to the rod’s axis.
2. We denote the cross-sectional area of
the rod by A, and the curve bounding
the cross-section by C, and let denote the three principal moments of area of
the cross-section (see Sect 10.2.1).
3. We introduce a warping function to describe the out-of-plane displacement
component in the cross-section of the rod. The warping function is related to the
out-of-plane displacement by
The warping function depends only on
the geometry of the cross-section, and satisfies the following governing
equations and boundary conditions
You can easily show that this choice
of will automatically satisfy the shear stress
equilibrium equation as well as the boundary condition on C.
4. Finally we define a modified polar
moment of inertia for the cross section as
Calculating the warping function is a
nuisance, because it requires the solution to a PDE. In desperation, you can take w=0 this will overestimate the torsional stiffness
of the rod, but in many practical applications the error is not
significant. For a better
approximation, warping functions can be estimated by neglecting the terms
involving in the governing equation. A few such approximate warping functions and
modified polar moments of area are listed in the table below.
The force-deformation relations for the rod are
The two shear force components cannot be related to the deformation they are Lagrange multipliers that enforce the
condition that the rod does not experience transverse shear, as discussed in
the preceding section.
Derivation: These results can be derived as
follows:
1. The elastic constitutive equations
for materials subjected to small distorsions, but arbitrary rotations, are
listed in Section 3.3. They have the
form
where are the components of the material stress
tensor, and are the components of the Lagrange strain
tensor. The components of in the basis can be found using the formulas for given in Section 10.2.7, and when substituted
into the constitutive laws give expressions for the components of material
stress in terms of the deformation measures , , and .
2. The Cauchy stress is related to the material
stress by .
For small distorsions, but arbitrary rotations, we may approximate this
by , so the components of the material
stress tensor in can be used as an approximation to the
components of the Cauchy stress tensor in .
3. Since we have assumed that the
tractions on the sides of the rod vanish, the in-plane stress components must
satisfy .
Substituting the formulas for stresses from (2) and noting that (because
the origin for the coordinate system coincides with the centroid of the cross
section) shows that , , and
4. Substituting the formula for into the definitions of , given in Section 10.2.8 and noting that (because the basis vectors coincide with the
principal axes of inertia) yields
5. Recall that the shear stress
components must satisfy the equilibrium equation and
boundary condition
Substituting the shear stress
components from step (2) into this equilibrium equation and setting gives the governing equation for w
6. The shear stresses now follow as
Substituting these results into the
equation defining in Section 10.2.6 gives the last equation
10.2.11 Strain energy of an elastic rod
The total strain energy of an elastic rod can be computed
from its curvatures as
Derivation: The derivation is similar to the procedure
used to compute elastic moment-curvature relations.
1. The strain energy density in the rod
can be computed from the Lagrange strain and the Material Stress as .
The material stress can be related to the Lagrange strain using the formulas
in Section 10.2.10, while the Lagrange strain can be expressed in terms of of
the deformation measures , , and using the formulas for the deformation
gradient listed in Sections 10.2.7.
2. The results can be simplified by
recalling that , , which shows that the strain energy
density can be approximated as
where w is the warping function defined in Section 10.2.9. The two terms
in this expression represent the strain energy density due to stretching and
bending the rod, and twisting the rod, respectively.
3. The total strain energy follows by
integrating U over the volume of the
rod. Using the measures of
cross-sectional geometry listed in Section 10.2.1, it is straightforward to
show that
4. Some additional algebra is required
to calculate the energy associated with twisting the rod. Begin by noting that
We need to show that the integral on
the right hand side of this expression is zero.
5. To this end, note that
where we have recalled that the
warping function w satisfies in A
as well as on C,
and have used the divergence theorem.
6. Secondly, note that
The sum of (5) and (6) is zero. Using this result and (4) gives the
expression for the strain energy of the rod.
