10.4 Exact solutions to
simple problems involving elastic rods
This section lists solutions to
various boundary and initial value problems involving deformable rods, to
illustrate representative applications of the equations derived in Sections
10.2.2 and 10.2.3. Specifically, we
derive solutions for:
1. The natural frequencies and mode
shapes for an initially straight vibrating beam;
2. The buckling load for a vertical rod
subjected to gravitational loading;
3. The full post-buckled shape for a
straight rod compressed by axial loads on its ends;
4. Internal forces and moments in an
initially straight rod that is bent and twisted into a helix;
5. Internal forces, moments, and the
deflected shape of a helical spring.
10.4.1 Free vibration of a straight beam without axial force
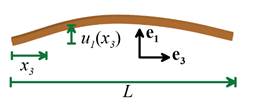 The figure illustrates the problem to be solved: an initially straight beam,
with axis parallel to the direction and principal axes of inertia
parallel to is free of external force. The beam has Young’s
modulus and mass density , and its cross-section has area A and principal moments of area .
Its ends may be constrained in various ways, as described in more detail
below. We wish to calculate the natural
frequencies and mode shapes of vibration for the beam, and to use these results
to write down the displacement for a beam that is caused to vibrate with
initial conditions , at time t=0.
The figure illustrates the problem to be solved: an initially straight beam,
with axis parallel to the direction and principal axes of inertia
parallel to is free of external force. The beam has Young’s
modulus and mass density , and its cross-section has area A and principal moments of area .
Its ends may be constrained in various ways, as described in more detail
below. We wish to calculate the natural
frequencies and mode shapes of vibration for the beam, and to use these results
to write down the displacement for a beam that is caused to vibrate with
initial conditions , at time t=0.
Mode shapes and natural frequencies: The physical
significance of the mode shapes and natural frequencies of a vibrating beam can
be visualized as follows:
1. Suppose that the beam is made to
vibrate by bending it into some (fixed) deformed shape ; and then suddenly releasing
it. In general, the resulting motion of
the beam will be very complicated, and may not even appear to be periodic.
2. However, there exists a set of
special initial deflections , which cause every point on the beam
to experience simple harmonic motion at some (angular) frequency , so that the deflected shape has the
form .
3. The special frequencies are called the natural frequencies of
the beam, and the special initial deflections are called the mode shapes. Each mode shape has a wave number , which characterizes the wavelength
of the harmonic vibrations, and is related to the natural frequency by
4. The mode shapes have a very useful property (which is proved
in Section 5.9.1):
The mode shapes, wave numbers and
corresponding natural frequencies depend on the way the beam is supported at
its ends. A few representative results
are listed below
Beam with free ends:
The wave numbers for each mode are given
by the roots of the equation
The mode shapes are
where are arbitrary constants.
Beam with pinned ends:
The wave numbers for each mode are
The mode shapes are , where are arbitrary constants.
Cantilever beam (clamped at , free at ):
The wave numbers for each mode are
given by the roots of the equation
The mode shapes are
where are arbitrary constants.
Vibration of a beam with given
initial displacement and velocity
The solution for free vibration of a beam
with given initial displacement and velocity can be found by superposing
contributions from each mode as follows
where
Derivation: We will derive the equations for the natural
frequencies and mode shapes of a beam with free ends as a representative
example. This is a small deflection
problem and can be modeled using Euler-Bernoulli beam theory summarized in
Section 10.3.2.
1. The deflection of the beam must
satisfy the equation of motion given in Sect 10.3.2
2. The general solution to this equation
(found, e.g. by separation of variables, or just by direct substitution) is
where the frequency and wave number
must be related by to satisfy the equation of motion.
3. The coefficients and the wave number must be chosen to satisfy the boundary
conditions at the ends of the bar. For
a beam with free ends, the boundary conditions reduce to , at .
Substituting the formula from (2) into the four boundary conditions, and
writing the resulting equations in matrix form yields
4. For a nonzero solution, the matrix in
this equation must be singular. This
implies that the determinant of the matrix is zero,
which gives the governing equation for the wave-number
5. Since the equation system in (3) is
now singular, we may discard any one of the four equations and use the other
three to determine an equation relating to .
Choosing to discard the last row of the matrix, and taking the first
column to the right hand side shows that
Solving this equation system shows
that
.
Substituting these values back into
the solution in step (2) gives the mode shape.
6. To understand the formula for the
vibration of a beam with given initial conditions, note that the most general
solution consists of a linear combination of all possible mode shapes, i.e.
Formulas for found by substituting , multiplying both sides of the
equation by and integrating over the length of the
beam. We know that
so the result reduces to
The formula for is found by differentiating the general
solution with respect to time to find the velocity, substituting , and then proceeding as before to
extract each coefficient .
10.4.2 Buckling of a column subjected to gravitational loading
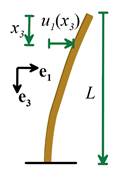 The problem to be solved is
illustrated in in the figure. A straight, vertical elastic cantilever beam with
mass density and elastic modulus is clamped at its base and subjected to
gravitational loading. The beam has length L,
cross-sectional area A and principal
moments of area .
The straight, vertical rod is always an equilibrium configuration, but
this configuration is stable only if .
The problem to be solved is
illustrated in in the figure. A straight, vertical elastic cantilever beam with
mass density and elastic modulus is clamped at its base and subjected to
gravitational loading. The beam has length L,
cross-sectional area A and principal
moments of area .
The straight, vertical rod is always an equilibrium configuration, but
this configuration is stable only if .
Our objective is to show that the
critical buckling length is
A number of different techniques can
be used to find buckling loads. One of
the simplest procedures (which will be adopted here) is to identify the
critical conditions where both the straight configuration (with ), and also the deflected configuration (with a small transverse
deflection ) are possible equilibrium shapes for the rod.
This problem can be solved using the
governing equations for a beam subjected to large axial forces, listed in
Section 10.3.3. For the present case,
we note that
1. The external forces acting on the rod
are , , where g is the gravitational acceleration;
2. The acceleration is zero (because the
rod is in static equilibrium)
3. The equilibrium equations therefore
reduce to
4. These equations must be solved
subject to the boundary conditions
5. Integrating the second equation of
(3) and using the boundary condition at reduces the first equation of (3) to
6. Integrating this equation with
respect to and imposing the boundary condition at shows that
7. This equation can be solved for using a symbolic manipulation program, which
yields
where are special functions called `Airy Wave
functions of order zero’
8. The remaining boundary conditions are
at , and at .
Substituting (7) into the boundary conditions and writing the results in
matrix form gives
where and are Airy wave functions of order 1.
9. For this system of equations to have
a nonzero solution, the determinant of the matrix must vanish, which shows that
must satisfy .
This equation can easily be solved (numerically) for .
The smallest value of that satisfies the equation is .
10. The buckling length follows as
10.4.3 Post-buckled
shape of an initially straight rod subjected to end thrust
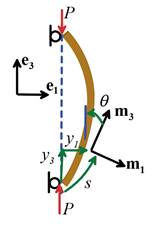 The figure illustrates the problem to
be solved. An initially straight,
inextensible elastic rod, with Young’s modulus E, length L and principal
in-plane moments of area (with ) is subjected to end thrust. The
ends of the rod are constrained to travel along a line that is parallel to the
undeformed rod, but the ends are free to rotate. We wish to calculate the deformed shape of
the rod. You are probably familiar with
the simple Euler buckling analysis that predicts the critical buckling
loads. Here, we derive the full
post-buckling solution.
The figure illustrates the problem to
be solved. An initially straight,
inextensible elastic rod, with Young’s modulus E, length L and principal
in-plane moments of area (with ) is subjected to end thrust. The
ends of the rod are constrained to travel along a line that is parallel to the
undeformed rod, but the ends are free to rotate. We wish to calculate the deformed shape of
the rod. You are probably familiar with
the simple Euler buckling analysis that predicts the critical buckling
loads. Here, we derive the full
post-buckling solution.
The rod is assumed to bow away from
its straight configuration as shown: the deflected rod lies in the plane
perpendicular to .
The basis and the Euler angle that characterize the rotation of the rod’s
cross sections are shown in the picture; the remaining Euler angles are .
Solution: Several possible equilibrium solutions may exist, depending
on the applied load P.
1. The straight rod, with is always an equilibrium solution. It is stable for applied loads .
2. For applied loads , with n an integer, there are n+1
possible equilibrium solutions. One of
these is the straight rod; the rest are possible buckling modes. The shape of each buckling mode depends on a
parameter which satisfies
where K denotes a complete
elliptic integral of the first kind
.
Note that K
has a minimum value at k=0,
and increases monotonically to infinity as .
The equation for has no solutions for , and n solutions for , as expected. If multiple solutions exist, only the
solution with n=1 is stable.
3. The shape of the deformed rod can be
characterized by the Euler angle , which satisfies
where sn(x,k) denotes a Jacobi-elliptic function called the
`sine-amplitude:’ its second argument k is
called the `modulus’ of the function.
4. The coordinates of the buckled rod
can also be calculated. They are given
by
Here am(x,k) and cn(x,k) denote Jacobi elliptic functions called the `amplitude’ and
`cosine amplitude’, and E(x,k)
denotes an incomplete elliptic integral of the second kind
.
The shape of the deflected rod for
the stable buckling mode (n=1) is
shown in the figure.
Derivation: This is a large deflection problem
and must be treated using the general equations listed in Sections 10.7-10.9.
1. The equilibrium equation immediately shows that T=constant along the rod’s length.
The boundary conditions at the end of the rod give , so that the components of T in follow as .
2. Substituting the expressions for into the moment balance equations shows that and
3. Finally, note that the curvatures are
, and recall that , so that the angle satisfies
4. This is the equation that governs
oscillations of a pendulum, and its solution is well known. The equation is
satisfied trivially by (this is the straight configuration), and also
by two one-parameter families of functions of the form
Here, and are parameters whose values must be determined
from the boundary conditions. The first
of these two functions is called an `inflexional’ solution, because the curve
has points where .
The second is called `non-inflexional’ because it has no such
points. For the pendulum, inflexional
solutions correspond to periodic swinging motion; the non-inflexional solution
corresponds to the pendulum whirling around the pivot.
5. The bending moment must satisfy at both ends of the rod, which requires that at and .
Only the inflexional solution can satisfy these boundary
conditions. For this case, we have
The cosine amplitude cn is a periodic
function (it is a generalized cosine) and satisfies at .
We may therefore satisfy the boundary conditions by choosing
and .
This leads to the defining equations
for .
6. Finally, the formula for the
coordinates follows by integrating and subject to boundary conditions at and at s=0.
7. Finally, the (global) stability of
the various solutions can be checked by comparing their potential energy.
10.4.4 Rod bent and twisted into a helix
 We consider an initially straight rod
with length L, Young’s modulus E and shear modulus .
The cross-section of the rod has area , principal in-plane moments of
inertia and an effective torsional inertia .
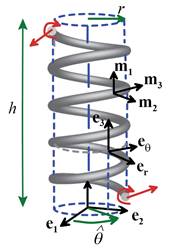
The rod is initially straight and
unstressed, and is then subjected to forces and moments on its ends to bend and
twist it into a helical shape, as shown in the figure. The geometry of the deformed
rod can be characterized by:
We consider an initially straight rod
with length L, Young’s modulus E and shear modulus .
The cross-section of the rod has area , principal in-plane moments of
inertia and an effective torsional inertia .
The rod is initially straight and
unstressed, and is then subjected to forces and moments on its ends to bend and
twist it into a helical shape, as shown in the figure. The geometry of the deformed
rod can be characterized by:
1. The radius r of the cylinder that generates the helix
2. The total number of turns N in the helix
3. The helix angle , which is related to n and the height h of the helix by , and to the deformed length l of the rod by
4. The twist curvature , which quantify the distorsion
induced by twisting the rod about its deformed axis. For the rod to be in equilibrium, must be constant.
5. The stretch ratio .
For the rod to be in equilibrium, must be constant, and follows as .
The geometry and forces in the
deformed rod are most conveniently described using a cylindrical-polar
coordinate system and basis shown in Figure 10.15. In terms of these basis vectors, we may
define
1. The tangent vector to the rod
2. The binormal vector is
In terms of these variables:
1. The internal moment in the rod is
2. The internal force in the rod is
For the limiting case of an
inextensible rod, the quantity should be replaced by an indeterminate axial
force .
The forces acting on the ends of the
rod must satisfy and at and at s=0.
A variety of force and moment systems
may deform the rod into a helical shape, depending on the twist and
stretch. An example of particular
practical significance consists of a force and moment acting at s=L
(with equal and opposite forces at s=0),
where
This force system is statically equivalent to a wrench with
force and moment acting at r=0.
Finally note that this analysis merely gives conditions for a
helical rod to be in static equilibrium.
The configuration may not be stable.
Derivation
1. We take at s=0,
so that the cylindrical polar coordinates are related to arc-length by . Note also that the basis vectors
satisfy , , so that
2. The position vector of a point on the
axis of the rod can be expressed as ;
3. The tangent vector follows as ;
4. By definition, the curvature vector
is
which can be expressed in terms of the
binormal vector as ;
5. The moment-curvature relations then
give the internal moment ;
6. The equilibrium equation shows that T=constant. We may express
this constant internal force vector in terms of its components as
7. The internal forces and moments must satisfy
the moment equilibrium equation, which shows that
Taking the dot product of both sides
of this equation with shows that . It then follows that and
8. Finally, the force-stretch relation
requires that .
This equation can be solved together with the final result of (7) for
the components of internal force in the rod.
10.4.5 Helical spring
 The behavior of the helical spring
shown in the figure can be deduced by
means of a simple extension of the results in the preceding section. We assume
that the spring is made from a material with shear modulus and Young’s modulus . The cross-section of the rod has
principal in-plane moments of inertia and an effective torsional inertia
. The rod is assumed to be
inextensible, for simplicity. The geometry
of the undeformed spring can be characterized as follows:
The behavior of the helical spring
shown in the figure can be deduced by
means of a simple extension of the results in the preceding section. We assume
that the spring is made from a material with shear modulus and Young’s modulus . The cross-section of the rod has
principal in-plane moments of inertia and an effective torsional inertia
. The rod is assumed to be
inextensible, for simplicity. The geometry
of the undeformed spring can be characterized as follows:
1. The length of the rod L;
2. The radius of the cylinder that generates the
helix;
3. The height of the spring;
4. The number of turns in the coil ;
5. The helix angle .
The variables characterizing the
undeformed spring are related as follows
The spring is subjected to equal and opposite axial forces and axial twisting moments at its ends, which act at the center
of the cylinder generating the helix.
The precise manner in which the forces are transmitted to the ends of
the helical rod is left unspecified, but we assume that the load points remain
at the heights of the ends of the coil and remain at the center of the cylinder
generating the helix. In practice, this
is always the case if the spring experiences only a small change in its shape,
but (depending on how the spring is designed) large deflections may cause the
applied forces to change their position or direction. This would change the behavior of the
spring.
Guided by the analysis in the preceding section, we anticipate that when
the spring is deformed, it remains helical, and consequently can be
characterized by the deformed radius , the new height h and the new
helix angle . The load point at the top end
of the spring may also rotate about the axis of the cylinder through an angle . It is of particular interest to
relate the deflection and rotation to the force and axial moment .
Solutions for small deflections and
rotations of the spring
If a helical spring is subjected to small changes in its length (or small twisting rotations ) the forces and twisting moment are
proportional to and . To give explicit formulas for spring stiffnesses, we assume in this
section that the rod has a circular cross-section with diameter d, so that . The twist and extension are then
related to the forces and moments by
where the stiffnesses and compliances
are listed the table.
|
Shear modulus
|
|
|
Poisson’s ratio
|
|
|
No. turns in coil
|
|
|
Coil (helix) radius
|
|
|
Helix pitch angle
|
|
|
Wire diameter
|
|
|
Wire length
|
|
|
Coil (helix) unstretched length
|
|
|
Extensional stiffness
|
|
|
Rotational stiffness
|
|
|
Extension-torsion stiffness
|
|
|
Force compliance
|
|
|
Torque compliance
|
|
|
Torque-extension compliance
|
|
We notice that:
· For practical values of pitch angle (which is typically less than 8
degrees) the stiffnesses can be approximated by
These are the formulas that typically
appear in design handbooks.
· The extensional and rotational
stiffnesses vary weakly with pitch angle . The stiffnesses and compliances
are most significantly affected by the wire diameter and the radius of the
coil. Increasing the number of turns in
the coil while keeping all other variables fixed will make the spring softer.
· For pitch angles exceeding about 20
degrees the coupling between rotation and axial force (or extension and torque)
becomes significant. As long as the
spring deflection remains small, a spring with freely rotating ends will tend
to uncoil as it is stretched. A spring
that is free of axial force will tend to extend when its ends are rotated. In applications where this is undesirable
two springs wound in opposite directions (one with a positive and a second with
a negative pitch angle) are placed end-to end to cancel the rotation.
Solutions for large deflections and
rotations of the spring
It is worth noting that the deformation in the helical part of a spring
cannot be determined fully without knowing how the ends of the helical rod are
connected to the force and moment acting on the coil. The derivations shown in more detail below
show that twisting the rod without changing the shape of the helix generates
internal forces and moments in the rod that are statically equivalent to a
vertical force and moment acting at the center of the coil. Consequently, prescribing only the force and
axial moment acting on the coil (or equivalently, prescribing the extension and
rotation angle) is not sufficient to fully determine the deformation of the
spring. Furthermore, the forces acting
on the spring may also depend on the history of deformation, since the ends of
the rod may experience a sequence of rotations that generate a nonzero twist
when the rod is returned to its original helical shape. In the formulas given in this section, we
have assumed that this does not occur. The force and moment acting on the
spring are then given by
where and r are related to the height h
of the deformed spring and the twist angle by
As an example, the force-extension relation and extension-rotation
relation are plotted in the figure .
Results are shown for a spring with 10 turns and a Poisson ratio of . Fig (a) shows the normalized
force and torque acting on a spring that is extended without twist; while Fig
(b) shows the force and rotation of a spring that is extended while freely
rotating. The graphs show that:
· A spring with pitch angle less than 8
degrees remains linear for extensions exceeding 25% of the wire length.
· Springs with larger pitch angles tend
to stiffen when extended, and soften when compressed.
· The torque acting on a spring that is
prevented from rotating, and the twist of a freely rotating spring vary
linearly with extension over only a narrow range of extension ( ). Significant rotations
(exceeding 20 degrees) can be expected if a freely rotating spring is stretched
or compressed beyond 25% of the wire length.
Derivation: The geometry and forces in the spring
are most conveniently described using a cylindrical-polar coordinate system and basis shown in Figure 10.16.
1. We take at s=0, so that the cylindrical polar coordinates are related to
arc-length by .
2. Note also that the basis vectors
satisfy , , so that
3. The position vector of a point on the
axis of the rod can be expressed as ;
4. The tangent vector follows as
;
5. The normal vector is
6. The binormal vector is
7. It is helpful to select a basis to characterize the orientation of
the initial spring. As usual is tangent to the rod. Since we may select and arbitrarily, as long as they are
transverse to the rod’s axis. It is convenient to choose and to be parallel to the normal
vector n and binormal vector b of the undeformed spring,
respectively, which gives
8. The initial curvature of the rod can
be calculated from the usual relation
This yields , so that
9. After deformation, the basis rotates to a new basis aligned with the deformed
rod. Because the rod’s cross section is
axially symmetric, and the rod is elastic, it is not necessary to assume that
the basis vectors and (which are transverse to the bar)
rotate with the rod’s twist. Instead,
we assume and remain parallel to the normal
vector n and binormal vector b of the deformed spring, respectively,
which gives
10. The curvature vector of the deformed
spring can therefore be expressed as
where accounts for the rotation of the
rod’s cross section about the tangent vector.
It cannot be determined from the orientation of and in the usual way, because they do
not rotate with the bar’s cross-section.
If the axial force and moment acting on the spring are prescribed without
any additional information specifying how the forces are connected to the ends
of the helix (or equivalently, if only the extension and rotation or the spring
are given) is not uniquely determined: the
detailed design of the portion of the spring that connects the helical coil to
the external loading system would determine whether the rod’s cross section at
the ends of the rod can twist about the rod’s center. In all the following calculations, we shall
assume that . This means that at s=L the rod’s cross section has an
angular velocity vector
as the spring is extended.
11. The co-rotational rate of change of
curvature (which quantifies the rate of change of twist and bending curvature
relative to the basis vectors aligned with the deformed rod) is
12. The moment-curvature relations then
give the internal moment
13. The boundary conditions at the upper
end of the spring relate the internal moment and force to the applied force
It is straightforward to show that this system of internal forces
satisfies the equilibrium equation
which confirms our assumption that the spring remains helical after
deformation.
14. Combining (9) and (10) shows that
|
|
|
|
This yields two equations relating the spring’s geometry to the external
force and moment
15. A final kinematic constraint relating
the geometry of the spring to the motion of the load point can be found using
the principle of virtual work. Matching
the internal and external rate of work gives
Comparing coefficients of F and
Q shows that
Hence
The results of steps 14 and 15 can be combined to calculate for any given extension and
rotation. For example, the small
deflection solution follows by setting
in (14), which shows that
Collecting terms and approximating gives
This yields the results listed in the
table.



