10.6 Simplified
versions of general shell theory flat plates and membranes
In many practical cases of interest
the general equations of shell theory can be vastly simplified. In this section, we summarize the governing
equations for a number of special solids, including equations governing
behavior of flat plates, and membranes.
10.6.1 Flat plates with small out-of-plane deflections and negligible
in-plane loading
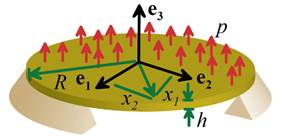 This is the simplest version of plate
theory, and is used in most practical applications. The figure illustrates the
problem to be solved. An initially flat
plate, which has uniform (small) thickness h,
Young’s modulus Poisson’s ratio and mass density , is subjected to a distributed force per unit area (acting vertically upwards). The edge of the plate can be constrained in
various ways, as discussed in more detail below. We wish to determine its deformed shape, as
well as the internal forces and moments in the plate.
This is the simplest version of plate
theory, and is used in most practical applications. The figure illustrates the
problem to be solved. An initially flat
plate, which has uniform (small) thickness h,
Young’s modulus Poisson’s ratio and mass density , is subjected to a distributed force per unit area (acting vertically upwards). The edge of the plate can be constrained in
various ways, as discussed in more detail below. We wish to determine its deformed shape, as
well as the internal forces and moments in the plate.
All vector and tensor quantities can
be expressed in a fixed Cartesian basis illustrated in the figure. The covariant and reciprocal basis vectors
are identical so there is no need to use the system of raised and lowered
indices that was needed in general shell theory. In addition, since the basis
vectors are independent of position, the Christoffel symbols are all zero. We continue to use the convention that Greek
subscripts can have values 1 or 2, while Latin subscripts may have values
1,2,3.
We make the following assumptions
1. The variation of displacements within
the plate conforms to the usual approximations of Kirchhoff plate theory, i.e. material
fibers that are perpendicular to the mid-plane of the undeformed plate remain
perpendicular to the mid-plane of the deformed plate, and stretching transverse
to the mid-plane is neglected.
2. The displacement of the mid-plane of
the plate has the form , i.e. material points on the
mid-plane of the plate deflect only transverse to the plate.
3. The mid-plane deflection is small
compared with the dimensions of the plate, and the slope of the deflected plate
is small, so that for all ; second order terms in displacement
are ignored in all the strain definitions and also the equilibrium equations.
The following (approximate) results can then be extracted
from the general shell equations:
Kinematics:
· The curvature change tensor is , while the in-plane strain tensor is
.
· The normal vector to the deformed
plate can be approximated as
· The displacement field in the plate
is approximated as
· The (infinitesimal) strain field in
the plate is approximated as .
Kinetics
· The external force is characterized
by the force per unit area acting on the surface of the plate;
· The in-plane stress tensor , so the internal forces are completely
characterized by the internal moment tensor and transverse force tensor ;
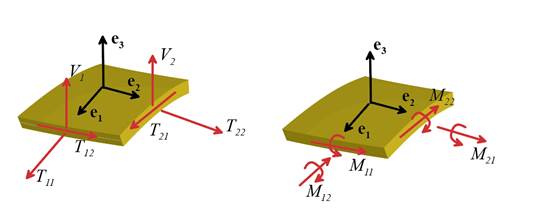
·  The components represent the vertical force per unit length
acting on an internal plane perpendicular to the direction;
The components represent the vertical force per unit length
acting on an internal plane perpendicular to the direction;
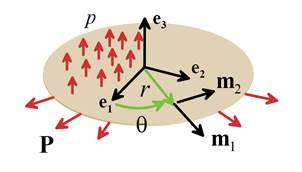
· The physical significance of is illustrated in the figure. characterizes the moment per unit length acting
on planes inside the shell that are normal to the direction, while characterizes the moment per unit length
acting on planes that are normal to .
Note that represents a moment about the axis, while is a moment acting about the axis.
Moment-Curvature relation reduces to
Equations of Motion are approximated by
(rotational inertia has been neglected). These equations can
be combined to eliminate V
and can also be expressed in terms of
the displacements as
Edge boundary conditions.
The edge of the plate is characterized by a curve C that lies in the mid-plane of the shell, encircling in a counterclockwise sense. We let denote arc-length measured around C from some convenient origin, and use and denote unit vectors tangent and normal to C.
Elementary plate theory offers the following choices of boundary
condition for each point on C:
1. Part of the boundary of the plate may be clamped, i.e. rotations and displacement of the
boundary are completely prevented. The transverse displacement must then
satisfy on .
2. Part of the boundary may be simply
supported, i.e. the boundary of the plate is prevented from moving, but is
permitted to rotate freely about the tangent vector .
In this case the transverse displacement and internal moment must
satisfy
3. Part of the boundary may be free,
i.e. the boundary is free to both translate and rotate. In this case the transverse shear force and
internal moment must satisfy
More general boundary conditions, in
which the edge of the plate is subjected to prescribed forces and moments, can
also be derived from the results given in Section 10.5.8 if this is of
interest.
Strain energy and kinetic energy of a
flat plate: The
formula for the strain energy and kinetic energy of the plate can be expressed
in terms of displacements as
The second term in the integral for
the kinetic energy represents the energy associated with the plate’s
out-of-plane rotation, and can be ignored in most practical applications.
10.6.2 Flat plates with small out-of-plane deflections and significant in-plane
loading
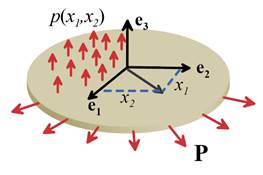 This version of plate theory is used
to model plates that are subjected to substantial loading parallel to the plane
of the plate (usually due to loads applied at its boundaries, as shown in the
figure). The theory assumes that displacements are small enough to use
linearized measures of strain, but includes nonlinear terms associated with the
in-plane loading in the equilibrium equations.
The theory can be used to calculate buckling loads for plates, but does
not accurately model their deformation if the buckling loads are exceeded.
This version of plate theory is used
to model plates that are subjected to substantial loading parallel to the plane
of the plate (usually due to loads applied at its boundaries, as shown in the
figure). The theory assumes that displacements are small enough to use
linearized measures of strain, but includes nonlinear terms associated with the
in-plane loading in the equilibrium equations.
The theory can be used to calculate buckling loads for plates, but does
not accurately model their deformation if the buckling loads are exceeded.
The problem to be solved is stated in
Sect 10.6.1. The majority of the
governing equations are identical to those of standard plate theory, given in 10.6.1
the equations which need to be modified to
account for transverse forces are listed below.
Kinematics:
· The in-plane strain tensor is
approximated as
· The displacement field in the plate
is approximated as
· The (infinitesimal) strain field in
the plate is approximated as
where the
components of the curvature change tensor are given in 10.6.1.
Kinetics
· The external force consists of a
force per unit area acting on the surface of the plate.
· The internal forces are characterized
as described in 10.6.1, except that the stress resultant tensor is nonzero. The components of the stress
resultant tensor can be interpreted as illustrated below: represents the force per unit length, acting
in the direction, on an internal plane perpendicular
to the direction within the plate.
Stress resultant-strain and Moment-Curvature relations
Equations of motion reduce to
The second two equations can be combined to eliminate V
This result can also be expressed in terms of displacement as
Edge boundary conditions. The edge of the plate is
characterized as described in Section 10.6.1.
Boundary conditions for the transverse displacement , transverse force and internal moment are identical to those listed in 10.6.2. In addition, the in-plane displacements or
forces must satisfy the following boundary conditions:
1. On part of the boundary of the plate , one or more components of the
in-plane displacement may be prescribed
2. Portions of the boundary of the plate
may be subjected to a prescribed in-plane
force per unit length .
The in-plane forces must then satisfy
10.6.3 Flat plates with small in-plane and large transverse deflections
(von Karman theory)
This version of plate theory is used
to model plates that are subjected to substantial loading parallel to the plane
of the plate (usually caused by loads applied at its boundaries), and also
experience substantial out-of-plane displacement. The theory uses a nonlinear strain measure to
account for the in-plane stretching that results from finite transverse
displacement and rotation, and includes nonlinear terms associated with the
in-plane loading in the equilibrium equations.
The theory can be used to estimate the shape of a buckled plate if the
buckling loads are exceeded.
We make the following assumptions
1. The variation of displacements within
the plate conforms to the usual approximations of Kirchhoff plate theory;
2. The displacement of the mid-plane of
the plate has the form : all three displacement components
are considered.
3. The in-plane deflections are small, and
satisfy for all ; second order terms in these displacement
components are ignored in all the strain definitions and also the equilibrium
equations. The out-of-plane displacement
is assumed to be small enough to use a linearized measure of curvature. However, the terms involving products of are retained when computing the strain of the
mid-plane of the plate, so that the stretching due to transverse deflection is
considered approximately.
4. The in-plane forces are assumed to be
much larger than transverse forces.
Nonlinear terms in the equilibrium equations involving in-plane forces
are retained; those associated with transverse loading are neglected.
Most of the governing equations of Von-Karman plate theory
are identical to those listed in the preceding section. Nevertheless, the full set of governing
equations is give below for convenience.
Kinematics:
· The in-plane strain tensor is
approximated by
The
additional, nonlinear, term in this expression is the main feature of
Von-Karman theory.
· The curvature change tensor has
components
· The normal vector to the deformed
plate can be approximated as
· The displacement field in the plate
is approximated as
· The (infinitesimal) strain field in
the plate is approximated as .
Kinetics
· The external force is characterized
by the force per unit area acting on the surface of the plate.
· The transverse stress tensor , so the Internal forces are
characterized by the in-plane stress resultant tensor , the transverse force tensor and internal moment tensor .
The physical significance of the components of these tenors is discussed
in Sections 10.6.1 and 10.6.2
Stress resultant-strain and Moment-Curvature relations
Equations of motion reduce to
where the rotational inertia term has been neglected in the
last equation.
Edge boundary conditions:
1. The boundary conditions for
transverse displacement and/or the internal moment and transverse force are identical to those listed in Section
10.6.1
2. The boundary conditions for in-plane
displacements and/or in-plane forces are identical to those listed in Section
10.6.2.
Alternative forms for the Von-Karman equations: If the plate is in static
equilibrium (so the velocity and acceleration of the plate is zero), the
Von-Karman equations can be written in a compact form by expressing the
in-plane forces in terms of an Airy stress function , following the procedure outlined for
plane elasticity problems in Section 5.2.
As a result, the governing
equations can be reduced to a pair of coupled, nonlinear partial differential
equations for and .
These formulas will not be given here, but can be found, e.g. in Timoshenko
and Woinowsky-Krieger, (1964).
10.6.4 Stretched, flat membrane with small out-of-plane deflections
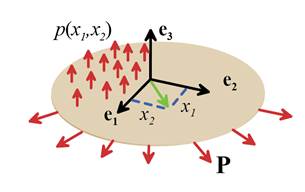 This is a simplified version of the
stretched plate theory outlined in 10.5, which can be used if the plate is so
thin that internal bending moments can be neglected. The problem to be solved is illustrated in the
figure. A `membrane’ with Young’s
modulus , Poisson’s ratio , mass density , and thickness h is initially planar and lies in the plane perpendicular to the direction. The edge of the membrane is
subjected to a load per unit length and prevented from moving transverse to the membrane. A force per unit area acts on the membrane, inducing a small, time
dependent, transverse deflection .
This is a simplified version of the
stretched plate theory outlined in 10.5, which can be used if the plate is so
thin that internal bending moments can be neglected. The problem to be solved is illustrated in the
figure. A `membrane’ with Young’s
modulus , Poisson’s ratio , mass density , and thickness h is initially planar and lies in the plane perpendicular to the direction. The edge of the membrane is
subjected to a load per unit length and prevented from moving transverse to the membrane. A force per unit area acts on the membrane, inducing a small, time
dependent, transverse deflection .
Kinematics:
· The in-plane strain tensor is
approximated as
· The displacement field in the plate
is approximated as .
We assume that .
· The curvature of the membrane has
components
· The (infinitesimal) strain field in
the membrane is approximated as
Kinetics
· The external force consists of a
force per unit area acting on the surface of the plate.
· The internal forces are characterized
by the stress resultant tensor (the internal moments are neglected).
Stress resultant-strain relations
Equations of motion are approximated as
The second equation can also be expressed in terms of
displacement as
Edge boundary conditions On the edge of the membrane
1. The transverse displacement must
satisfy
2. The in-plane forces must satisfy , where n is a unit vector in the plane perpendicular to the edge of the
membrane.
10.6.5 Membrane equations in cylindrical-polar coordinates
 In this section, we re-write the
governing equations for a stretched membrane in a cylindrical-polar coordinate
system, to provide a simple example of the use of general curvilinear
coordinates. We re-consider the membrane
described in the preceding section, but now assume that the membrane is
circular, with radius R.
In this section, we re-write the
governing equations for a stretched membrane in a cylindrical-polar coordinate
system, to provide a simple example of the use of general curvilinear
coordinates. We re-consider the membrane
described in the preceding section, but now assume that the membrane is
circular, with radius R.
HEALTH WARNING: We use polar coordinates illustrated in the figure as the choice of curvilinear coordinates. However, all vector and tensor quantities will
be expressed as covariant or contravariant components in the natural basis for
this coordinate system, not as
components in a cylindrical-polar basis of unit vectors .
Coordinate system and kinematic relations
1. Let be a fixed Cartesian basis of mutually
perpendicular unit vectors, with normal to the plane of the undeformed membrane.
2. The position vector of a point in the
membrane can be expressed as
3. The natural basis vectors and the
reciprocal basis (for the undeformed membrane) follow as
Here the reciprocal basis has simply
been written down by inspection you can readily verify that .
Note that neither the natural basis vectors nor the reciprocal basis
vectors are unit vectors.
4. The Christoffel symbols for the coordinate
system and the curvature tensor for the undeformed membrane follow as
5. The position vector of a point in the
deformed membrane is
6. The natural basis vectors and
reciprocal basis for the deformed membrane follow as
where terms of order , etc have been neglected in the
expression for .
The reciprocal basis vectors can also be calculated, but are not
required in the analysis to follow.
7. For small transverse deflections, the
Christoffel symbols associated with the deformed membrane can be approximated
using those for the undeformed membrane.
The curvature tensor for the deformed membrane has covariant components
Notice that the curvature components
all have different units this is because the basis vectors themselves
have units. It is easy to check that the terms in the dyadic product all have correct units.
Equations of Motion: The general equations of motion for a
shell are
We proceed to simplify these for a flat membrane.
1. No external moments act on the membrane, and the membrane
thickness is assumed to be so small that the internal moments can be neglected. We may also assume . The equations of motion in the right-hand
column then show that transverse forces must vanish, and that the in-plane forces are symmetric .
2. Substituting for the Christoffel
symbols and curvature components into the remaining equations of motion and
recalling that in-plane forces , we find that the three remaining
equilibrium equations reduce to
Boundary conditions:
1. The transverse displacement must
satisfy on the edge of the membrane at r=R.
2. The in-plane forces must satisfy , where is the force per unit length acting on the
edge of the membrane at r=R.
Special case: membrane subjected to
uniform biaxial in-plane loading: If the membrane is subjected to a
uniform radial force per unit length acting on its edge at r=R, the first two equations of motion and the boundary conditions
are satisfied by .
This corresponds to a state of uniform biaxial tension in the
membrane. The equation of motion for the
transverse deflection reduces to
