2.4 Equations of motion and
equilibrium for deformable solids
In this section, we
generalize the laws of mass conservation, conservation of linear and angular
momentum) to a deformable solid.
2.4.1 Mass Conservation
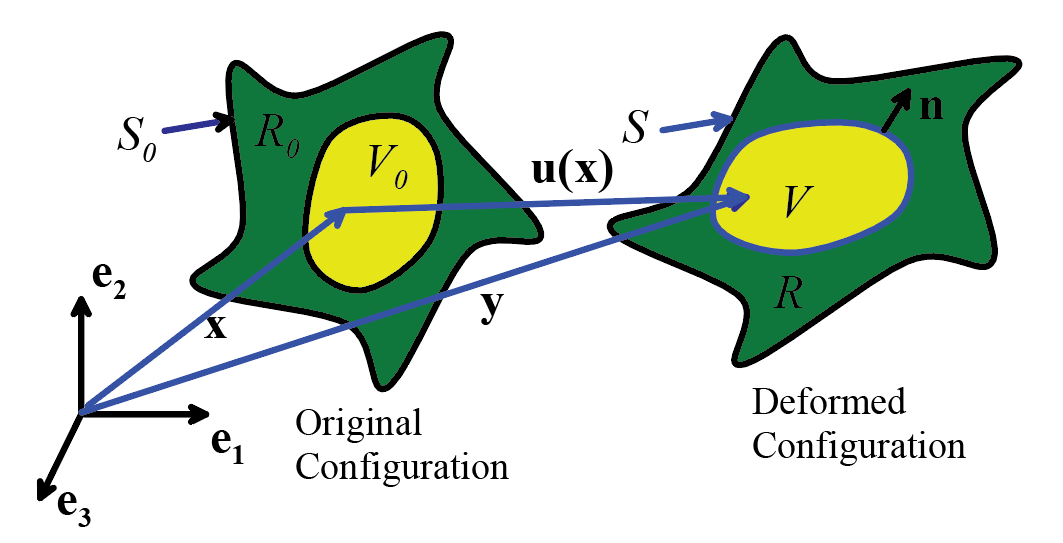
The total mass of any subregion V (as shown in the figure) within a
deformable solid must be conserved. We
can write express this condition as a constraint in several different ways. The rate of change of total mass within V must be zero, so that
where is the mass density in the deformed
solid. Or, (using Reynolds transport
relation, proved in Section 2.2.27) we can write a local mass conservation equation, which relates the rate of change
of mass density to the velocity gradient
The Eulerian version of the mass conservation equation is
more common in fluid mechanics

2.4.2 Linear momentum balance in
terms of Cauchy stress
Consider a solid
that is deformed by external forces, as shown in the figure. Let denote the Cauchy stress distribution within a
deformed solid. Assume that the solid is
subjected to a body force , and let and denote the displacement, velocity and
acceleration of a material particle at position in the deformed solid.
Newton’s third law of motion (F=ma)
can be expressed as
Written out in full
Note that the derivative is taken with
respect to position in the actual, deformed solid. For the special (but rather
common) case of a solid in static equilibrium in the absence of body forces
Derivation: Recall that the
resultant force acting on an arbitrary volume of material V within a solid is
where T(n) is the internal traction acting on
the surface A with normal n that bounds V.
The linear momentum of the volume V is
where v is the
velocity vector of a material particle in the deformed solid. Express T in terms of and set . Then
Apply the divergence theorem to convert the first integral
into a volume integral, and note that one can show (see Appendix E) that
So
Since this must hold for every volume
of material within a solid, it follows that
as stated.
2.4.3 Angular
momentum balance in terms of Cauchy stress
Conservation of
angular momentum for a continuum requires that the Cauchy stress satisfy
i.e. the stress
tensor must be symmetric.
Derivation: write down the
equation for balance of angular momentum for the region V within the deformed solid
Here, the left hand side is the resultant
moment (about the origin) exerted by tractions and body forces acting on a
general region within a solid. The right
hand side is the total angular momentum of the solid about the origin.
We can write the
same expression using index notation
Express T in terms of and re-write the first integral as a volume integral
using the divergence theorem
We may also show (see
Appendix E) that
Substitute the last two results into the angular momentum
balance equation to see that
The integral on the right hand side of this expression is
zero, because the stresses must satisfy the linear momentum balance
equation. Since this holds for any
volume V, we conclude that
which is the result we wanted.
2.4.4 Equations of
motion in terms of other stress measures
In terms of nominal
and material stress the balance of linear momentum is
Note that the
derivatives are taken with respect to position in the undeformed solid.
The angular momentum
balance equation is
To derive these
results, you can start with the integral form of the linear momentum balance in
terms of Cauchy stress
Recall (or see
Appendix E for a reminder) that area elements in the deformed and undeformed
solids are related through
In addition, volume
elements are related by . We can use these results to re-write the
integrals as integrals over a volume in the undeformed
solid as
Finally, recall that
and that to see that
Apply the divergence
theorem to the first term and rearrange
Once again, since
this must hold for any material volume, we conclude that
The linear momentum
balance equation in terms of material stress follows directly, by substituting
into this equation for in terms of
The angular momentum balance equation
can be derived simply by substituting into the momentum balance equation in
terms of Cauchy stress
