Chapter 3
Constitutive Models: Relations between Stress and Strain
The equations listed in Chapter 2 are
universal they apply to all deformable solids. They can’t be solved, however, unless the
deformation measure can be related to the internal forces.
The constitutive model for a material is a set of equations relating
stress to strain (and possibly strain history, strain rate, and other field
quantities). Unlike the governing
equations in the previous chapter, these equations cannot generally be
calculated using fundamental physical laws (although people are trying to do
these calculations). Instead,
constitutive models are fit to experimental measurements.
Before discussing specific
constitutive models, it is helpful to review the basic assumptions that we take
for granted in developing stress-strain laws.
They are listed below.
·  A very small sample
that is extracted from the solid has uniform properties;
A very small sample
that is extracted from the solid has uniform properties;
· When the solid is
deformed, initially straight lines in the solid are deformed into smooth curves
(with continuous slope), as shown in the figure.
· This means that very short line
segments (much shorter than the radius of curvature of the curves) are just
stretched and rotated by the deformation.
Consequently, the change in shape of a sufficiently small volume element
can be characterized by the deformation gradient;
· The stress at a point in the solid
depends only on the change in shape of a vanishingly small volume element
surrounding the point. It must therefore
be a function of the deformation gradient or a strain measure that is derived
from it. This is called the ‘principle
of local action’
If we accept the preceding
assumptions, it means that we can measure the relationship between stress and
strain by doing an experiment that induces a uniform strain in a suitable sample of the material. According to our assumptions, the stress should
also be uniform, and can be calculated from the forces acting on the specimen.
These are clearly
approximations. Materials are not really
uniform at small scales, whether you choose to look at the atomic scale, or the
microstructural scale. However, these features
are usually much smaller than the solid part or component, and the material can
be regarded as statistically uniform,
in the sense that if you cut two specimens with similar size out of the material
they will behave in the same way. A
continuum model then describes the average
stress and deformation in a region of the material that is larger than
microstructural features, but small compared with the dimensions of the part.
3.1 General requirements for constitutive equations
You may be called upon to develop a stress-strain law for a
new material at some point of your career.
If so, it is essential to make
sure that the stress-strain law satisfies two conditions:
(i)
It must obey the laws of thermodynamics.
(ii)
It must satisfy the condition of objectivity, or material frame indifference.
In
addition, it is a good idea to ensure that the material satisfies the Drucker stability criterion discussed in more detail below. Of course, your proposed law must conform to
experimental measurements, and if possible, should be based on some understanding
of the physical processes that govern the response of the solid.
3.1.1 Thermodynamic restrictions
Constitutive laws usually start by
expressing the specific internal or free energy, specific entropy, and heat
flux of a material in terms of the temperature , deformation measures characterizing
shape changes, and any internal state variables (such as yield stress) that
characterize the material state. These
have the general form
For a solid with mass density (in the
deformed configuration) experiencing a stretch rate and Cauchy stress , the first and second laws of
thermodynamics then require that
for all possible processes. The second condition is called the “free
energy imbalance.” It is often
convenient to express the condition in terms of other deformation and stress
measures. To this end, define:
· Mass per unit reference volume
· Deformation gradient, right
Cauchy-Green deformation tensor and Lagrange strain
· Nominal and material stress
· Referential heat flux
With these definitions, the free
energy imbalance condition can be re-written as
You can try deriving these as an exercise.
In practice, we usually use only the free
energy imbalance law when developing constitutive equations. The first law can always be satisfied by some
appropriate heat flux q. Furthermore,
for the majority of problems in solid mechanics, we do not need to model
deformation and heat conduction simultaneously (there are exceptions of course,
such as high strain rate deformation; thermoelasticity, and so on). We can assume that the solid is in
equilibrium with a surrounding heat bath with constant temperature, and heat
flow through a solid is sufficiently rapid to ensure that the temperature
remains approximately uniform. Under
these conditions the free energy imbalance condition reduces to
This expression can be re-written in
terms of other stress and deformation measures if need be. Physically, it states that the rate of work
done by stresses must always equal or exceed the rate of change of free energy
of the solid.
As a specific example, suppose that
we are interested in developing constitutive equations for an elastic solid
that is subjected to large deformations (these are called ‘hyperelastic’
materials). Examples of equations used
in practice are listed in Section 3.5.
One way to do this would be to find a scalar function that quantifies
the Helmholtz free energy of our material as a function of the right
Cauchy-Green strain tensor C and
temperature .
The general free energy imbalance condition then requires that
for all possible variations of C and .
Taking the time derivative of the free energy and substituting into the
free energy imbalance condition gives
Since this must hold for all (with ) we conclude that the material stress and entropy must be related to our
free energy function by
while the heat conduction law must satisfy
In Section 3.5, constant temperature
versions of this type of constitutive equation are developed by choosing
specific functions for the strain energy density that can be fit to experiment. The stress-strain law then follows from the
free energy imbalance condition.
3.1.2 Material Frame Indifference (Objectivity):
The principle of material frame
indifference is two simple ideas: (i) the stress (or strictly speaking the change in stress) in a solid is
determined only by the way it changes its shape (and possibly changes its temperature),
and nothing else; and (ii) the constitutive model should predict the correct
stress for any mathematical way we choose to describe its motion and
deformation. We can regard the first idea
as a consequence of the principle of local action, and it appears to be a
reasonable assumption about the way solids behave. The second is self evident. Unfortunately, the way we actually test
whether a constitutive model satisfies frame indifference involves a rather confusing
thought experiment and some complicated mathematics. As a result, the principle has been
questioned and there is a substantial and often confusing literature on the
subject (Frewer, 2009, has a nice review).
To test for frame indifference, we
need to check that the constitutive law ‘works for any possible mathematical
way we choose to describe its motion and deformation.’ In all the constitutive laws discussed in
this book, the change in a shape and orientation of a material element is
described by the deformation gradient or some other strain measure that can be
expressed in terms of this quantity. So,
we need to check that the model works for any conceivable way we might
calculate the deformation gradient. Recall
that we calculate the deformation gradient as follows (i) Choose a ‘reference
configuration’ for the solid, which assigns each particle in the material a
coordinate X. (ii) Write down the position of each particle
after deformation as a function of time , and then (iii) Calculate the
deformation gradient as -
or if we choose a coordinate system, we can say .
We normally use the initial physical
region occupied by the specimen to choose X
so for example if we wanted to calculate the
change in length of a vertical tensile bar we would compare it to its initial
length i.e. using a vertical tensile bar as the
reference configuration. But there is
no reason why we have to do this. We
could equally well compare its length to that of an undeformed horizontal
tensile bar. This amounts to rotating
the ‘reference configuration’ for the bar from a vertical to a horizontal orientation. In fact, if we are rather strange (e.g. mathematicians),
we might even calculate the change in length by comparing it to the initial
length of an imaginary undeformed tensile bar that is spinning around in
space. This means we are using a rotating
reference configuration. But as long
as we do the calculations correctly, we can still calculate the change in
length of the specimen.
This is essentially the test we use
to check that a constitutive law satisfies the principle of material frame
indifference the goal is to make sure that the constitutive
model works for any possible choice of
reference configuration that preserves the shape of the solid, including one
that rotates in space. However, since
we have to describe more than just a length change the mathematics is a bit
more complicated.

The thought experiment we use for
this purpose is illustrated in the figure. We suppose that the deformation of a solid is
observed (and modeled mathematically) by two observers. The first observer is a normal person, who
describes shape changes using the initial configuration of the solid as the
reference configuration this is how we have treated deformation in the
rest of this book, to give the deformation mapping a simple physical interpretation. The second observer is a crazy
mathematician, who chooses to use an imaginary reference configuration that has
the same shape as the actual initial configuration of the solid, but which
rotates and translates through space.
Furthermore, the crazy mathematician chooses to model everything using a
coordinate system that rotates and translates with this imaginary reference
configuration (this is necessary because the reference configuration has to be
time independent). This might seem a bit
disturbing, because this coordinate system is not an inertial frame, but that
doesn’t matter we can use any coordinate system to analyze
motion in the actual inertial frame, as long as we transform the vectors in
physical space to the rotating frame correctly.
In fact, we do this without thinking when we analyze particle motion
using cylindrical polar coordinates: since the polar basis vectors rotate with respect to the inertial frame, we
use a modified definition of acceleration in the rotating basis, but the
formula for acceleration in polar coordinates still describes the acceleration
in the inertial frame. The views of the
world with respect to these two observers is shown in the figure: both see a
stationary reference configuration with an identical shape. The rotating observer sees exactly the same deformed
solid as the stationary observer, but the whole world appears to be spinning
and moving with respect to his or her coordinate system.
We discussed how the vectors and tensors
that we use to describe motion and deformation of a solid are transformed from
the inertial frame (used by the sane observer) to the rotating frame (used by
the crazy observer) in Section 2.7. Recall that vectors specifying a particular
point in space transform between these frames as
where are three real numbers specifying a point in the inertial frame; are the new coordinates of the same point in
the rotating frame (these are now three time dependent numbers, reflecting the
fact that a fixed point in the inertial frame appears to move in the rotating
frame), is an arbitrary point in the inertial frame, is an arbitrary vector valued function of time
t and is a time dependent proper orthogonal tensor (
and ). The
coordinates of points in the reference configuration transform as (because both observers see an identical
reference configuration, and we have chosen to put their reference
configurations in the same place in their two coordinate systems).
We showed that the
coordinates of vectors and tensors we use in continuum mechanics must transform
in a predictable way from the inertial frame to the rotating frame as a result
of this transformation. There is a list
in Section 2.7. For example, we found
that Cauchy stress tensors and the stretch rate tensors must transform as
(tensors of this kind are called
‘frame indifferent’ or ‘objective’).
Here, are the numbers that the rotating observer
would use to characterize Cauchy stress, while are the corresponding numbers used by the
observer in the inertial frame. Although
they are different, both sets of numbers quantify the force per unit area
acting on the same physical element of surface in the solid. The numbers representing deformation
gradient, material stress and Lagrange strain transform as
Constitutive equations are functions
that relates some tensor valued deformation measure(s) to some other tensor
valued stress measure. They are tensor
valued functions of one or more tensor valued variable. There are infinitely many such functions but the principle of material frame
indifference requires that the tensor
valued quantity these functions claim to predict must transform correctly under
our change of coordinate system and reference configuration. It is a way to ensure that the material
model will predict the same behavior for all possible mathematical descriptions
of how the solid changes its shape even a very strange description in which we
use a rotating reference configuration and a rotating coordinate system.
So for example a simple linear
viscous constitutive law defined (in the inertial frame) by the equation
(where and are constants) is material frame indifferent,
because if we use coordinates in the rotated frame it predicts correctly that
they are related by
To see this, note that , so that substituting and factoring:
which is consistent with the required
transformation of Cauchy stress . But a constitutive equation of the form where L
denotes the velocity gradient is not material frame indifferent because (see section 2.7). Of course, this constitutive equation makes
no sense in any case, because is symmetric and L is not!
This does not mean that constitutive
equations can only be expressed in terms of frame indifferent tensors,
however. A (rather simple minded)
elastic constitutive law that relates material stress to Lagrange strain by the
equation
satisfies the principle of material frame indifference,
because both material stress and Lagrange strain are invariant under our change
of reference frame.
Most modern constitutive equations
try to describe the underlying microscopic processes that govern its response,
and if this is done properly, the law will be frame indifferent. But some constitutive laws are just
curve-fits some mathematical relationship between a
deformation measure and a force measure and not all possible relationships will
transform correctly.
Problems arise most commonly in trying to develop rate forms of constitutive equations,
which are intended to relate some measure of strain rate to stress rate. For example we might try to express a rather
dumb elastic constitutive law in rate form as
This constitutive
equation is not material frame indifferent, because we showed in Section 2.7
that D is a frame indifferent tensor
but is not. It is not hard to see the
cause of this problem if we consider a stretched tensile specimen
that rotates in space, the stresses would clearly change with time, because the
principal directions of stress rotate. But the solid is not changing its shape,
so the constitutive law says the stress rate should be zero. The test for ‘frame indifference’ warns us
of this inconsistency.
There are various fixes for this the constitutive law can be written in terms
of invariant quantities (eg by relating the rate of change of material stress
to Lagrange strain rate); they can be derived from physical principles, in
which case frame indifferent measures usually emerge naturally from the
treatment; or frame indifferent measures of time derivatives can be specially
constructed.
As a specific example, one way to
construct a frame indifferent stress rate is to use the rate of change of
stress components with respect to a basis that rotates with the solid (this is
what an observer rotating with the material would actually see). This sounds easy we just choose some basis vectors with each basis vector parallel to a
particular material fiber. But this
doesn’t quite work, because of course the basis vectors won’t generally remain
orthogonal under an arbitrary deformation.
So rather than attach to particular material fibers, we simply
suppose that they rotate with the average
angular velocity of all material fibers passing through a particular
point. This means that
where W is the
spin tensor. Now, the time derivative of
stress can be written as
Here, the first term on the right
hand side can be interpreted as the stress rate seen by an observer who rotates
with the material; while the second and third are the additional rate of change
of stress caused by the rotation of the material. The first term on the right hand side is
called the Jaumann stress rate. It
is defined as
We showed in Section
2.7 that is frame indifferent. Many constitutive
equations assume that material stretch rate is proportional to this special
stress rate. For example, we could write
Provided that is a frame indifferent fourth-order tensor, this constitutive equation
would be frame indifferent.
Hopefully this discussion has
convinced you that the principle of material frame indifference is a
mathematical consequence of the way we describe stresses and shape changes in a
solid, and is necessary to ensure that solid mechanics is self-consistent. The
various objections to the principle that can be found in the literature arise because
there is a more restrictive (and hence controversial) version of the principle
that asserts that a material in a rotating frame (e.g. when tested in a
centrifuge) must have the same stress-strain behavior as a stationary
specimen. This happens to be true for
virtually all constitutive equations that are in common use, but it is better
to regard this as a prediction resulting
from the principle of material frame indifference and the particular choice of
strain measures in these models, rather than a general assumption about the way
materials must behave. It is perfectly
possible to construct continuum theories of solids in which a change in
orientation or a nonzero angular velocity will influence the stresses in the
material, while satisfying the version of frame indifference described in this
book. These theories need to make use
of frame indifferent measures of the angular velocity of the solid (which would
depend on the spin of the observer relative to the inertial
frame). They may also need to use more elaborate descriptions of deformation
and internal forces than the constitutive equations discussed in this chapter (e.g.
strain measures involving higher order derivatives of the deformation mapping,
or force measures quantifying internal moments).
In closing, however, it is worth pointing out
that the solid mechanicians concept of a ‘shape change’ (which leads to the
concept of a reference configuration and hence frame indifference) cannot be
applied to all materials. For example, suppose we try to apply the conventional
view of a solid to model a 2-phase gas that contains atoms of species A and
B. At any instant, we can certainly
define a ‘material element’ in the sense of solid mechanics by choosing a
reasonably large tetrahedron connecting some suitable subset of 4 atoms in the
gas. We can then define quantities such
as ‘density,’ ‘concentration,’ ‘internal material surface’ and so on, and
describe the behavior of this volume using the ideas in this book. We can use this approach to model sound wave
propagation through the gas, for example. But this view of a gas becomes
problematic if we recall that we also use some separate laws to describe how A
and B mix. For example, if we start
with a container in which A and B have a non-uniform concentration, the
concentration will gradually evolve to become uniform (assuming the atoms have
the same mass or the container is in zero gravity!). We think of this process as ‘diffusion’ and
model it with Fick’s law. But if atoms can diffuse, it becomes difficult to
define a ‘material element’ in the sense of solid mechanics, because atoms
would slowly cross any imaginary surfaces we place inside the gas. In reality
there is no easy way to distinguish between ‘diffusion’ and ‘deformation’ at
the atomic scale. Both are just motion
of atoms as a result of interactions with their neighbors they just occur at different time scales. Of course, we would not idealize a gas as a
solid in most calculations. Many
theories of gas flow do not use concepts such as a ‘material volume’ and
‘material surface;’ they also do not attempt to describe the undeformed ‘shape’
of a gas. Instead, they quantify
stresses by tractions acting on fixed spatial surfaces, and use stress measures
that include contributions from the momentum transport through these surfaces.
They also use concepts such as ‘partial stresses’ to quantify the stresses
associated with different phases in the gas.
These theories have to be ‘frame indifferent’ in some sense, but the
solid mechanics version of frame indifference does not apply. This may sound appealing to those who
question the principle of material frame indifference, but theories that
describe gas or fluid flow are difficult to apply to solids, because they
cannot easily describe the tendency of a solid to return to a preferred shape
when it is unloaded. They do not even have a clear description of how external
forces act on a physical element of material.
Perhaps in future a unified continuum theory will emerge that does not
distinguish between gases, fluids and solids.
In the meantime, we have to remember that all our models are
approximations, and apply them only when these approximations are valid.
3.1.3 Drucker Stability
 For most practical applications, the
constitutive equation must satisfy a condition known as the Drucker stability
criterion, which can be expressed as follows.
Consider a deformable solid, subjected to boundary tractions , which induce some displacement
field , as shown in the figure. Suppose
that the tractions are increased to , resulting in an additional
displacement . The material is said to be stable
in the sense of Drucker if the work done by the tractions through the displacements is positive or zero for all :
For most practical applications, the
constitutive equation must satisfy a condition known as the Drucker stability
criterion, which can be expressed as follows.
Consider a deformable solid, subjected to boundary tractions , which induce some displacement
field , as shown in the figure. Suppose
that the tractions are increased to , resulting in an additional
displacement . The material is said to be stable
in the sense of Drucker if the work done by the tractions through the displacements is positive or zero for all :
You can show that this condition is
satisfied as long as the stress-strain relation obeys
where is the change in Kirchhoff stress, and is an increment in strain resulting from an
infinitesimal change in displacement .
This is not a thermodynamic law (the
work done by the change in tractions
is not a physically meaningful quantity), and there is nothing to say that real
materials have to satisfy Drucker stability. In fact, many materials show clear
signs that they are not stable in the
sense of Drucker. However, if you try
to solve a boundary value problem for a material that violates the Drucker
stability criterion, you are likely to run into trouble. The problem will probably not have a unique
solution, and in addition you are likely to find that smooth curves on the
undeformed solid develop kinks (and
may not even be continuous) after the solid is deformed. This kind of deformation violates one of the
fundamental assumptions underlying continuum constitutive equations.
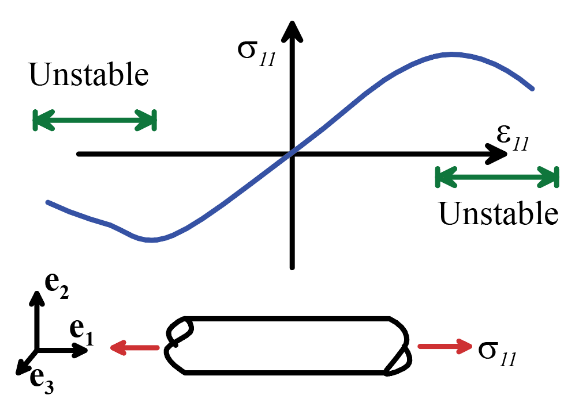 A simple example of a stress-strain
curve for material that is not stable in the sense of Drucker is shown in the
figure. The stability criterion is violated wherever the stress decreases with strain in tension, or increases with strain in compression.
For the former we see that , while ; for the latter , while .
A simple example of a stress-strain
curve for material that is not stable in the sense of Drucker is shown in the
figure. The stability criterion is violated wherever the stress decreases with strain in tension, or increases with strain in compression.
For the former we see that , while ; for the latter , while .
In the following chapter, we outline
constitutive laws that were developed to approximate the behavior of a wide
range of materials, including polycrystalline metals and non-metals;
elastomers; polymers; biological tissue; soils; and metal single crystals. A few additional material models, which
account for material failure, are described in Chapter 9.
