3.8 Small strain viscoplasticity:
creep and high strain rate deformation of crystalline solids
Viscoplastic constitutive equations
are used to model the behavior of polycrystalline materials (metals and
ceramics) that are subjected to stress at high temperatures (greater than half
the melting point of the solid), and also to model the behavior of metals that
are deformed at high rates of strain (greater than 100 per second).
Viscoplasticity theory is a
relatively simple extension of the rate independent plasticity model discussed
in Section 3.7. You may find it helpful
to review this material before attempting to read this section.
3.8.1 Features of creep behavior
Creep under uniaxial loading
1. If a tensile specimen of a
crystalline solid is subjected to a time independent stress, it will
progressively increase in length. A
typical series of length-v-time curves is illustrated below
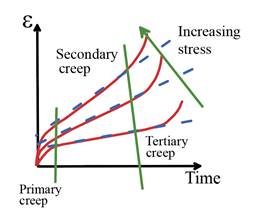
2. The length-v-time plot has three
stages: a transient period of primary
creep, where the creep rate is high; a longer period of secondary creep, where the extension
rate is constant; and finally a period of tertiary
creep, where the creep rate again increases. Most creep laws focus on modeling primary
and secondary creep. In fact, it is
often sufficient to model only secondary creep.
3. The rate of extension increases with
stress. A typical plot of secondary
creep rate as a function of stress is shown in the figure below. There are usually three regimes of behavior:
each regime can be fit (over a range of stress) by a power-law with the form .
At low stresses, ; at intermediate stresses , and at high stress m increases rapidly and can exceed
10-20.

4. The rate of extension increases with
temperature. At a fixed stress, the
temperature dependence of strain rate can be fit by an equation of the form , where is an activation energy; is the Boltzmann constant, and T is temperature. Like the stress exponent m, the activation energy can transition from one value to another as
the temperature and stress level is varied.
5. The various regimes for m and are associated with different mechanisms of
creep. At low stress, creep occurs
mostly by grain boundary sliding and diffusion.
At higher stresses it occurs as a result of thermally activated
dislocation motion. H.J. Frost and M.F.
Ashby (1982) plot charts that are helpful to get a rough idea of which
mechanism is likely to be active in a particular application.
6. The creep behavior of a material is
strongly sensitive to its microstructure (especially grain size and the size
and distribution of precipitates) and composition.
Creep under multi-axial loading
Under proportional multi-axial
loading, creep shows all the same characteristics as rate independent
plasticity: (i) plastic strains are volume preserving; (ii) creep rates are
insensitive to hydrostatic pressure; (iii) the principal strain rates are
parallel to the principal stresses; (iv) plastic flow obeys the Levy-Mises flow
rule. These features of behavior are discussed in
more detail in Sect 3.7.1.
3.8.2 Features of high-strain rate behavior
Stress-strain curves for metals have
been measured for strain rates as high as /sec.
The general form of the stress-strain curve is essentially identical to
that measured at quasi-static strain rates (see Sect 3.7.1 for an example), but
the flow stress increases with strain rate.
A schematic of typical stress-v-strain rate curve for a ductile material
such as Al or Cu is shown in the figure below. The flow stress rises slowly
with strain rate up to a strain rate of about s-1, and then begins to rise
rapidly.

3.8.3 Small-strain, viscoplastic constitutive equations
Viscoplastic constitutive equations are almost identical to
the rate independent plastic equations in Section 3.7. The main concepts in viscoplasticity are,
1. Strain rate decomposition into elastic and plastic components;
2. Elastic stress-strain law, which specifies the elastic part of the strain rate in terms
of stress rate;
3. The plastic flow potential, which determines the magnitude of the
plastic strain rate, given the stresses and the resistance of the material to
flow.
4. State
Variables which characterize the resistance of the material to flow
(analogous to yield stress)
5. The plastic flow rule, which specifies the components of plastic strain rate under multiaxial
loading. Recall that in rate independent plasticity the flow rule was expressed
as the derivative of the yield surface with respect to stress. In viscoplasticity, the flow rule involves
the derivative of the plastic flow potential
6. Hardening laws which
specify the evolution of the state variables with plastic strain.
These are discussed in more detail below.
Strain rate decomposition
We assume infinitesimal deformation, so shape changes are
characterized by the infinitesimal strain tensor .
The strain rate is decomposed into elastic and plastic parts
as
Elastic constitutive equations
The elastic strains are related to
the stresses using the standard linear elastic stress-strain law. The elastic strain rate follows as
where are the components of the elastic compliance
tensor. For the special case of an
isotropic material with Young’s modulus and Poisson’s ratio
Plastic flow potential
The plastic flow potential specifies
the magnitude of the plastic strain rate, as a function of stress and the
resistance of the material to plastic flow.
It is very similar to the yield surface for a rate independent
material. The plastic flow potential is
constructed as follows.
1. Define the plastic strain rate magnitude
as
2. Let denote the stresses acting on the material,
and let denote the principal stresses;
3. Experiments show that the plastic
strain rate is independent of hydrostatic pressure. The strain rate must be a function of only the
deviatoric stress components, defined as
4. Assume that the material is
isotropic. The strain rate can therefore
only depend on the invariants of the
deviatoric stress tensor. The deviatoric
stress has only two nonzero invariants. It is convenient to choose
In practice, only the
first of these (the von Mises effective stress) is used in most flow potentials.
5.  The plastic flow potential can be
represented graphically by plotting it as a function of the three principal
stresses, exactly as the yield surface is shown graphically for a rate
independent material. An example is
shown in the figure. The lines show contours
of constant plastic strain rate.
The plastic flow potential can be
represented graphically by plotting it as a function of the three principal
stresses, exactly as the yield surface is shown graphically for a rate
independent material. An example is
shown in the figure. The lines show contours
of constant plastic strain rate.
6. For Drucker stability, the contours
of constant strain rate must be convex, and the plastic strain rate must
increase with strain rate in the direction shown in the figure.
7. Just as the yield stress of a rate
independent material can increase with plastic strain, the resistance of a
viscoplastic material to plastic straining can also increase with strain. The resistance to flow is characterized by
one or more material state variables,
which may evolve with plastic straining.
The most general form for the flow potential of an isotropic
material is thus
where must satisfy for all (with state variables held fixed), and must
also be a convex function of
Examples of flow potentials: Von-Mises flow potential with
power-law rate sensitivity
Creep is often modeled using the a flow
potential of the form
where , and , i=1..N are material properties ( are the activation energies for the various
mechanisms that contribute to creep); k
is the Boltzmann constant and T is
temperature. The model is most often
used with N=1, but more terms are
required to fit material behavior over a wide range of temperatures and strain
rates. The potential has several state variables, .
To model steady state creep, you can take to be constant; to model transient creep, must increase with strain. An example of an evolution law for is given below.
High strain rate
deformation is also
modeled using a power law Mises flow potential: the following form is sometimes
used:
where and are material properties, while is a strain, strain rate and temperature dependent
state variable, which represents the quasi-static yield stress of the material
and evolves with deformation as described below. In this equation, so as to model the transition in strain rate
sensitivity at high strain rates; while controls the point at which the transition
occurs.
Plastic flow rule
The plastic flow rule specifies the components of plastic
strain rate resulting from a multiaxial state of stress. It is constructed so that:
1. The plastic strain rate satisfies the
Levy-Mises plastic flow rule
2. The viscoplastic stress-strain law
satisfies the Drucker stability criterion
3. The flow rule predicts a plastic
strain magnitude consistent with the flow potential.
Both (1) and (2) are satisfied by
If g depends on
stress only through the Von-Mises effective stress, this expression can be
simplified to
For the particular case of the Power-law von Mises flow potential this gives
Hardening rule
The hardening rule specifies the
evolution of state variables with plastic straining. Many different forms of hardening rule are
used (including kinematic hardening laws such as those discussed in 3.7.5). A simple example of an isotropic hardening law which is often used to model transient
creep is
Where
is the accumulated strain associated
with each mechanism of creep, and and are material constants. The law is usually used only with N=1.
Similar hardening laws are used in
constitutive equations for high strain rate deformation; but in this case the
flow strength is made temperature dependent.
The following formula is sometimes used
where is the total accumulated strain, T is temperature, and are material properties. More sophisticated hardening laws make the
flow stress a function of strain rate see Clifton (1990) for more details.
3.8.4 Representative values of parameters for viscoplastic models of
creeping solids
Fitting material parameters to test
data is conceptually straightforward: the flow potential has been constructed
so that for a uniaxial tension test with , all other stress components zero,
the uniaxial plastic strain rate is
so the properties can be fit directly
to the results of a series of uniaxial tensile tests conducted at different
temperatures and applied stresses. To model steady-state creep can be taken to be constant. One, or two terms in the series is usually
sufficient to fit material behavior over a reasonable range of temperature and
stress.
Creep rates are very sensitive to the
microstructure and composition of a material, so for accurate predictions you
will need to find data for the particular material you plan to use. Frost and Ashby “Deformation Mechanism Maps,”
Pergamon Press, 1982 provide approximate expressions for creep rates of a wide
range of materials, as well as references to experimental data. As a rough guide, approximate values for a
1-term fit to creep data for polycrystalline Al alloys subjected to stresses in
the range 5-60MPa are listed in the table below.

3.8.5 Representative values of parameters for viscoplastic models of high
strain rate deformation
The material parameters in
constitutive models for high strain rate deformation can also be fit to the
results of a uniaxial tension or compression test. For the model described in Section 3.7.3, the
steady-state uniaxial strain rate as a function of stress is
The material constants , and the flow stress can be determined from a series of uniaxial
tension tests conducted at different temperatures and levels of applied stress;
while can be found from . If strain hardening can be
neglected, is a temperature dependent constant, which
could be approximated crudely as , where are constants and T is temperature. Viscoplastic
properties of materials are very strongly dependent on their composition and
microstructure, so for accurate predictions you will need to find data for the
actual material you intend to use.
Clifton (1990) describes several
experimental techniques for testing material at high strain rates, and contains
references to experimental data. As a
rough guide, parameter values for 1100-0 Al alloy (fit to data in Clifton 1990)
are listed in the table below. The value
of was estimated by assuming that the solid loses
all strength at the melting point of Al (approximately 650C).

