Chapter 4
Solutions to Simple Boundary and Initial Value Problems
for Elastic Solids
In this chapter, we derive exact
solutions to several problems involving elastic solids. The examples have been selected partly
because they can easily be solved, partly because they illustrate clearly the
role of the various governing equations and boundary conditions in controlling
the solution, and partly because the solutions themselves are of some practical
interest.
4.1 Axially and
spherically symmetric solutions to quasi-static linear elastic problems
If an isotropic, linear elastic solid
with spherical or cylindrical geometry is loaded so that it remains spherical
or cylindrical after deformation, its shape and the internal stresses can
usually be calculated by solving a straightforward ordinary differential
equation for the displacement field.
This section derives the simplified equations for solids with the
relevant geometry, and solves a few representative problems as examples.
4.1.1 Summary of governing equations of linear elasticity in Cartesian
components
It is helpful to review briefly the
equations we must solve in order to calculate deformation in an elastic
material subjected to loading.
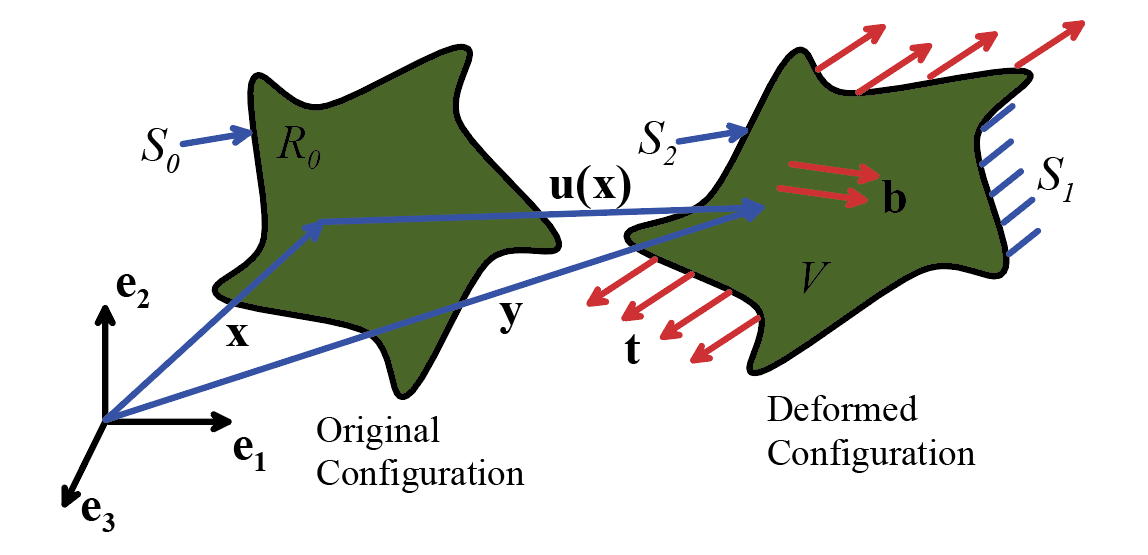 A representative problem is sketched in
the figure. We are given the following information
A representative problem is sketched in
the figure. We are given the following information
1. The geometry of the solid
2. A constitutive law for the material
(i.e. the linear elastic-stress-strain equations)
3. Body force density (per unit mass) (if any)
4. Temperature distribution (if any)
5. Prescribed boundary tractions and/or boundary displacements
In addition, to simplify the problem, we make the following
assumptions
1. All displacements are small. This means that we
can use the infinitesimal strain tensor to characterize deformation; we do not
need to distinguish between stress measures, and we do not need to distinguish
between deformed and undeformed configurations of the solid when writing
equilibrium equations and boundary conditions.
2. The material is an isotropic, linear
elastic solid, with Young’s modulus E
and Poisson’s ratio , and mass
density
With these assumptions, we need to solve for the displacement
field , the strain field and the stress field satisfying the following equations:
· Displacementstrain relation
· Stressstrain relation
· Equilibrium Equation (static problems only you need the acceleration terms for dynamic
problems)
· Traction boundary conditions on parts of the boundary where tractions are
known.
· Displacement boundary conditions on parts of the
boundary where displacements are known.
4.1.2 Simplified equations for spherically symmetric
linear elasticity problems
 A representative
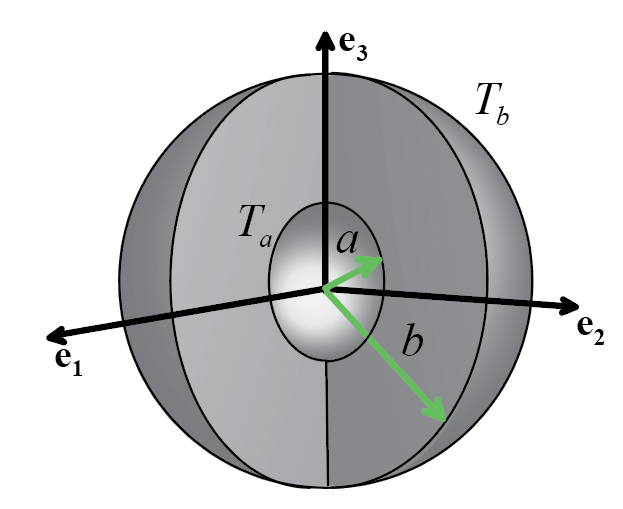
spherically symmetric problem is illustrated in the figure. We consider a hollow, spherical solid, which
is subjected to spherically symmetric loading (i.e. internal body forces, as
well as tractions or displacements applied to the surface, are independent of and , and act in the
radial direction only). If the
temperature of the sphere is non-uniform, it must also be spherically symmetric
(a function of R only).
A representative
spherically symmetric problem is illustrated in the figure. We consider a hollow, spherical solid, which
is subjected to spherically symmetric loading (i.e. internal body forces, as
well as tractions or displacements applied to the surface, are independent of and , and act in the
radial direction only). If the
temperature of the sphere is non-uniform, it must also be spherically symmetric
(a function of R only).
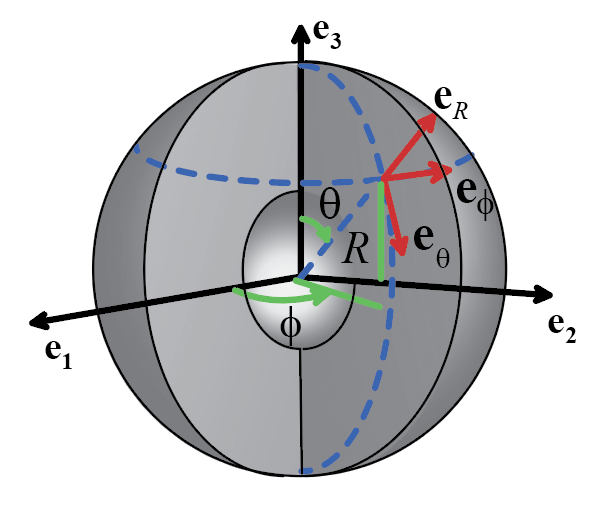
The solution is most
conveniently expressed using a spherical-polar coordinate system, illustrated in
the figure. The general procedure for
solving problems using spherical and cylindrical coordinates is complicated,
and is discussed in detail in Appendix D.
In this section, we simply summarize the special form of these equations
for spherically symmetric problems.
As usual, a point in
the solid is identified by its spherical-polar co-ordinates . All vectors and
tensors are expressed as components in the basis shown in the figure. For a spherically symmetric problem
· Position Vector
· Displacement vector
· Body force vector
Here, and are scalar functions. The stress and strain
tensors (written as components in ) have the form
and furthermore must satisfy . The tensor components have exactly
the same physical interpretation as they did when we used a fixed basis, except that the subscripts (1,2,3) have
been replaced by .
For spherical symmetry, the governing
equations of linear elasticity reduce to
· Strain Displacement Relations
· StressStrain relations
· Equilibrium Equations
· Boundary Conditions
Prescribed Displacements
Prescribed Tractions
These results can
either be derived as a special case of the general 3D equations of linear
elasticity in spherical coordinates (see Appendix D), or alternatively can be
obtained directly from the formulas in Cartesian components. Here, we briefly outline the the latter.
1. Note that we can find the components of in the basis as follows. First, note that is radial, and can be written in terms of the
position vector as . Next, note and . Using index notation, the components of the
basis vectors in are therefore
where , is the Kronecker delta and is the permutation symbol.
2. The components of
the (radial) displacement vector in the basis are .
3. To proceed with the algebra, it is helpful
to remember that , and
4. The components of
the strain tensor in the basis therefore follow as
5. The strain components can then be found as , and . Substituting for the basis vectors and
simplifying gives the strain-displacement relations. For example
where we have noted . The remaining components are left
as an exercise.
6. Finally, to derive the equilibrium
equation, note that the stress tensor can be expressed as . Substituting for the basis vectors from item (1)
above gives
7. Substitute the preceding result into
the equilibrium equation
and work through a good deal of
tedious algebra to see that
4.1.3 General solution to the spherically symmetric
linear elasticity problem
Our goal is to solve
the equations given in Section 4.1.2 for the displacement, strain and stress in
the sphere. To do so,
1. Substitute the
strain-displacement relations into the stress-strain law to show that
2. Substitute this
expression for the stress into the equilibrium equation and rearrange the
result to see that
Given the
temperature distribution and body force this equation can easily be integrated
to calculate the displacement u. Two arbitrary constants of integration will
appear when you do the integral these must be determined from the boundary conditions at the inner and
outer surface of the sphere.
Specifically, the constants must be selected so that either the
displacement or the radial stress have prescribed values on the inner and outer
surface of the sphere.
In the following
sections, this procedure is used to derive solutions to various boundary value
problems of practical interest.
4.1.4 Pressurized hollow sphere
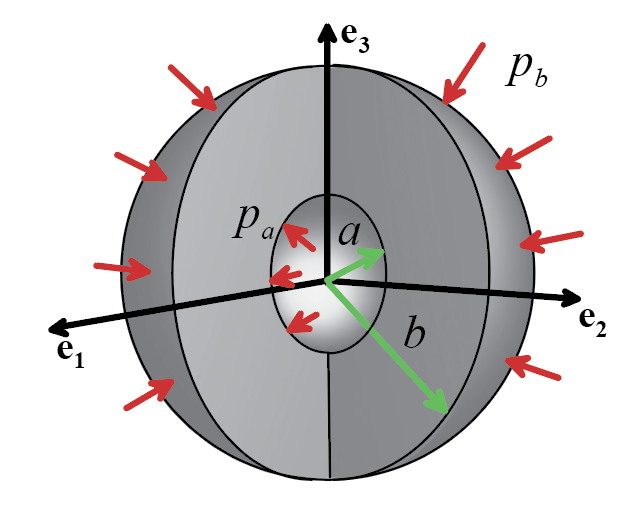 A pressurized sphere
is illustrated in the figure. Assume that
A pressurized sphere
is illustrated in the figure. Assume that
· No body forces act
on the sphere
· The sphere has
uniform temperature
· The inner surface R=a is subjected to pressure
· The outer surface R=b is subjected to pressure
The displacement, strain and stress fields
in the sphere are
Derivation: The solution can be found by applying the
procedure outlined in Sect 4.1.3.
1. Note that the
governing equation for u (Sect 4.1.3)
reduces to
2. Integrating twice
gives
where A and B are constants of integration to be determined.
3. The radial stress
follows by substituting into the stress-displacement formulas
4. To satisfy the
boundary conditions, A and B must be chosen so that and (the stress is negative because the pressure
is compressive). This gives two
equations for A and B that are easily solved to find
5. Finally, expressions
for displacement, strain and stress follow by substituting for A and B in the formula for u in (2), and using the formulas for
strain and stress in terms of u in
Section 4.1.2.
4.1.5 Gravitating sphere
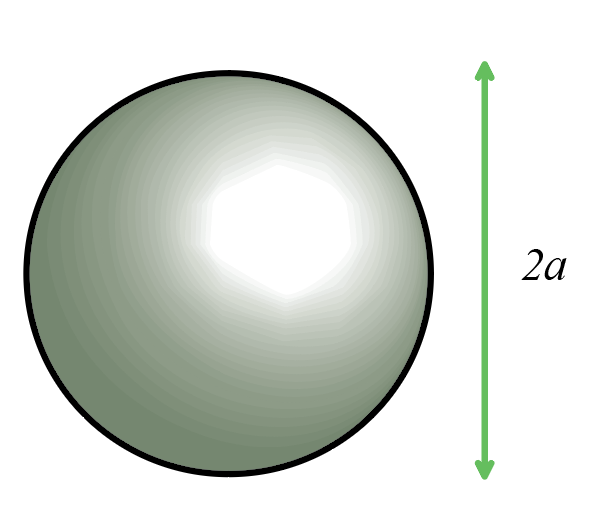 A planet under its
own gravitational attraction may be idealized (rather crudely) as a solid
sphere with radius a, illustrated in the
figure. The solid is subjected to the following loading
A planet under its
own gravitational attraction may be idealized (rather crudely) as a solid
sphere with radius a, illustrated in the
figure. The solid is subjected to the following loading
· A body force per unit mass, where g is the
acceleration due to gravity at the surface of the sphere
· A uniform
temperature distribution
· A traction free
surface at R=a
The displacement, strain and stress in the
sphere follow as
Derivation:
1. Begin by writing the
governing equation for u given in
4.1.3 as
2. Integrating
where A and B are
constants of integration that must be determined from boundary conditions.
3. The radial stress
follows from the formulas in 4.1.3 as
4. Finally, the
constants A and B can be determined as follows: (i) The stress must be finite at , which is only
possible if . (ii) The surface of the sphere is traction
free, which requires at R=a. Substituting the latter condition into the
formula for stress in (3) and solving for A
gives
5. The final formulas
for stress and strain follow by substituting the result of (4) back into (2),
and using the formulas in Section 4.1.2.
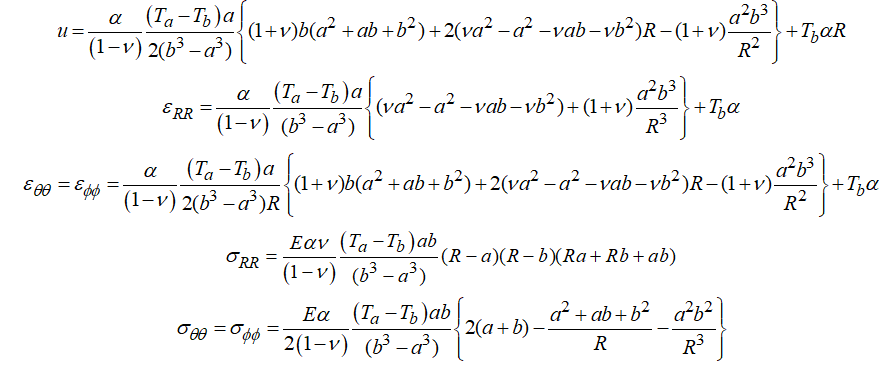
4.1.6 Sphere with steady state heat flow
 The deformation and
stress in a sphere that is heated on the inside (or outside), and has reached
its steady state temperature distribution can be calculated as follows. A hollow sphere is shown in the figure. Assume
that
The deformation and
stress in a sphere that is heated on the inside (or outside), and has reached
its steady state temperature distribution can be calculated as follows. A hollow sphere is shown in the figure. Assume
that
· No body force acts
on the sphere
· The temperature distribution in the sphere is
where and are the temperatures at the inner and outer
surfaces. The total rate of heat loss
from the sphere is , where k is the thermal conductivity.
· The surfaces at R=a and R=b
are traction free.
The displacement, strain and stress fields
in the sphere follow as
Derivation:
1. The differential
equation for u given in 4.1.3 reduces
to
2. Integrating
where A and B are constants of integration.
3. The radial stress
follows from the formulas in 4.1.3 as
4. The boundary
conditions require that at r=a
and r=b. Substituting these conditions into the result
of step (3) gives two equations for A
and B which can be solved to see that
4.1.7 Simplified equations for axially symmetric linear
elasticity problems
Two examples of
axially symmetric problems are illustrated below. In both cases the solid is a circular
cylinder, which is subjected to axially symmetric loading (i.e. internal body
forces, as well as tractions or displacements applied to the surface, are
independent of and , and act in the
radial direction only). If the
temperature of the sphere is non-uniform, it must also be axially symmetric (a
function of r only). Finally, the solid can spin with steady
angular velocity about the axis.
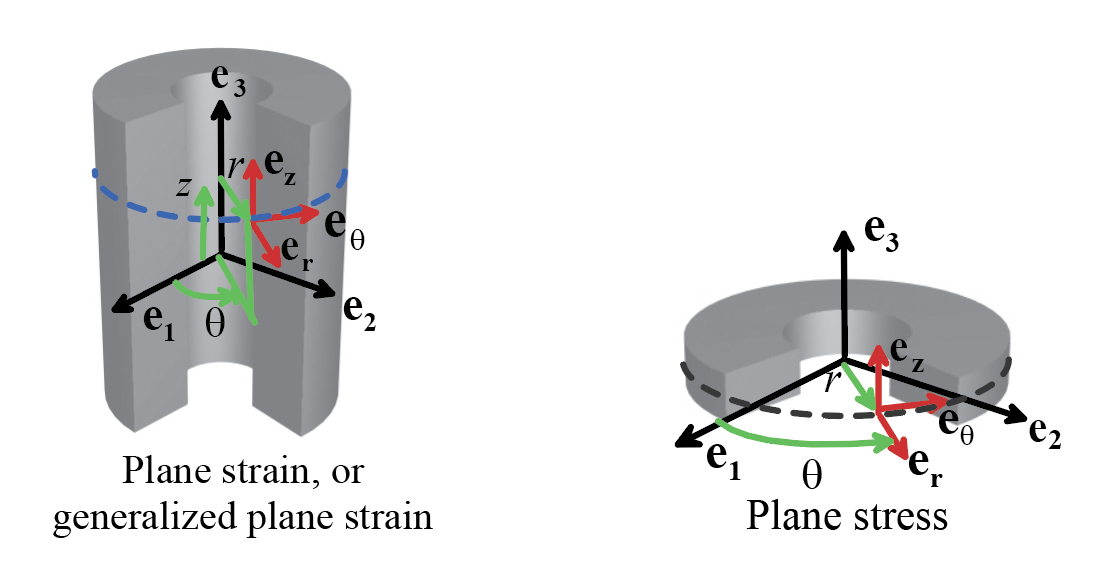
The two solids have
different shapes. In the first case, the
length of the cylinder is substantially greater than any cross-sectional
dimension. In the second case, the
length of the cylinder is much less than its outer radius.
The state of stress
and strain in the solid depends on the loads applied to the ends of the
cylinder. Specifically
· If the cylinder is completely prevented from stretching
in the direction a state of plane strain exists in the solid.
This is an exact solution to the 3D equations of elasticity, is valid
for a cylinder with any length, and is accurate everywhere in the cylinder.
· If the top and bottom surface of the short plate-like
cylinder are free of traction, a state of plane
stress exists in the solid. This is
an approximate solution to the 3D equations of elasticity, and is accurate only
if the cylinder’s length is much less than its diameter.
· If the top and bottom
ends of the long cylinder are subjected to a prescribed force (or the
ends are free of force) a state of generalized
plane strain exists in the cylinder.
This is an approximate solution, which is accurate only away from the
ends of a long cylinder. As a rule of
thumb, the solution is applicable approximately three cylinder radii away from
the ends.
The solution is most
conveniently expressed using a cylindrical-polar coordinate system, illustrated
in Figure 4.6. A point in the solid is
identified by its spherical-polar co-ordinates . All vectors and
tensors are expressed as components in the basis shown in the figure. For an axially symmetric problem
· Position Vector
· Displacement vector
· Body force vector
· Acceleration vector
Here, and are scalar functions.
The stress and strain tensors (written as components in ) have the form
For axial symmetry, the governing
equations of linear elasticity reduce to
· Strain Displacement Relations
· StressStrain relations (plane strain and generalized plane strain)
where for plane strain, and constant for generalized
plane strain.
· StressStrain relations (plane stress)
· Equation of motion
· Boundary Conditions
Prescribed Displacements
Prescribed Tractions
Plane strain solution
Generalized plane strain solution,
with axial force applied to cylinder:
These results can
either be derived as a special case of the general 3D equations of linear
elasticity in spherical coordinates, or alternatively can be obtained directly
from the formulas in Cartesian components.
Here, we briefly outline the the latter.
1. Note that we can
find the components of in the basis as follows. First, note that is radial a radial unit vector can be written in terms
of the position vector as . Next, note and . Using index notation, the components of the
basis vectors in are therefore
where , and we use the
convention that Greek subscripts range from 1 to 2
2. The components of
the (radial) displacement vector in the basis are .
3. To proceed with the
algebra, it is helpful to remember that , and
4. The components of
the strain tensor in the basis therefore follow as
5. The strain components can then be found as , and . Substituting for the basis vectors and
simplifying gives the strain-displacement relations. For example
where we have noted . The remaining components are left
as an exercise.
6. Finally, to derive the equilibrium
equation, note that the stress tensor can be expressed as . Substituting for the basis vectors from
item(1) above gives
7. Substitute the preceding result into
the equilibrium equation
and crank through a good deal of
tedious algebra to see that
4.1.8 General
solution to the axisymmetric boundary value problem
Our goal is to solve the equations given in
Section 4.1.2 for the displacement, strain and stress in the sphere. To do so,
1. Substitute the
strain-displacement relations into the stress-strain law to show that, for
generalized plane strain
where is constant.
The equivalent expression for plane stress is
2. Substitute these
expressions for the stress into the equilibrium equation and rearrange the
result to see that, for generalized plane strain
while for plane
stress
Given the
temperature distribution and body force these equations can be integrated to
calculate the displacement u. Two arbitrary constants of integration will
appear when you do the integral these must be determined from the boundary conditions at the inner and
outer surface of the cylinder.
Specifically, the constants must be selected so that either the
displacement or the radial stress have prescribed values on the inner and outer
surface of the sphere. Finally, for the
generalized plane strain solution, the axial strain must be determined, using the equation for the
axial force acting on the ends of the cylinder.
In the following
sections, this procedure is used to derive solutions to various boundary value
problems of practical interest.
4.1.9 Long (generalized plane strain) cylinder subjected
to internal and external pressure.
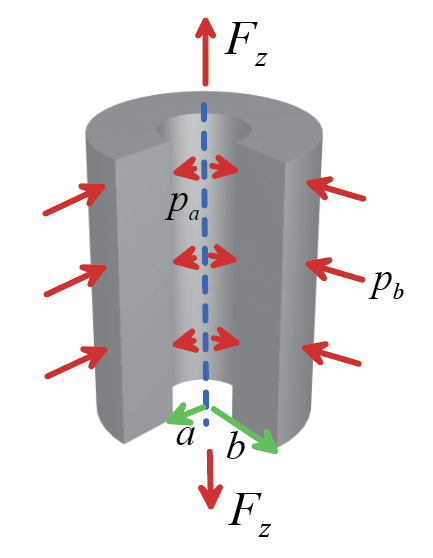 We consider a long hollow cylinder
with internal radius a and external
radius b as shown in the figure. Assume that
We consider a long hollow cylinder
with internal radius a and external
radius b as shown in the figure. Assume that
· No body forces act
on the cylinder
· The cylinder has
zero angular velocity
· The sphere has
uniform temperature
· The inner surface r=a is subjected to pressure
· The outer surface r=b is subjected to pressure
· For the plane strain solution, the cylinder does not
stretch parallel to its axis. For the
generalized plane strain solution, the ends of the cylinder are subjected to an
axial force as shown.
In particular, for a closed ended
cylinder the axial force exerted by the pressure inside the cylinder acting on
the closed ends is
The displacement, strain and stress fields in the cylinder
are
where for plane strain, while
for generalized plane strain.
Derivation: These results can be derived as
follows. The governing equation reduces
to
The equation can be integrated to see that
The radial stress follows as
The boundary conditions are (the stresses are negative because the
pressure is compressive). This yields
two equations for A and B that area easily solved to see that
The remaining results follow by elementary algebraic
manipulations.
4.1.10 Spinning circular plate
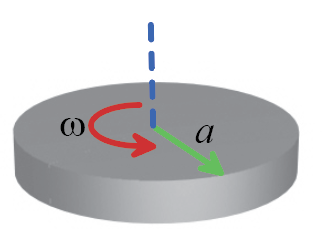 We consider a thin
solid plate with radius a that spins
with angular speed about its axis, as shown in the figure. Assume that
We consider a thin
solid plate with radius a that spins
with angular speed about its axis, as shown in the figure. Assume that
· No body forces act
on the disk
· The disk has
constant angular velocity
· The disk has uniform
temperature
· The outer surface r=a and the top and bottom faces of the
disk are free of traction.
· The disk is
sufficiently thin to ensure a state of plane stress in the disk.
Derivation:
To
derive these results, recall that the governing equation is
The equation can be integrated to see that
The displacement must be bounded at r=0, which is only possible if B=0.
With this substitution, the radial stress follows as
The radial stress must be zero at r=a, which requires that
The remaining results follow by
straightforward algebra.
4.1.11 Stresses
induced by an interference fit between two cylinders
Interference fits are often used to
secure a bushing or a bearing housing to a shaft. In this problem we calculate the stress
induced by such an interference fit.
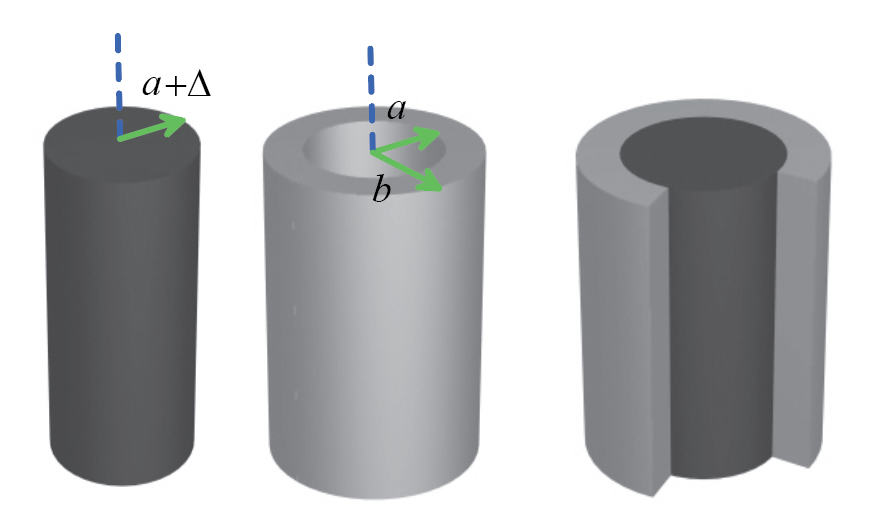
Consider a hollow cylindrical
bushing, with outer radius b and
inner radius a. Suppose that a solid shaft with radius , with is inserted into the cylinder as shown above (In practice, this is done by heating the
cylinder or cooling the shaft until they fit, and then letting the system
return to thermal equilibrium)
· No body forces act
on the solids
· The angular velocity
is zero
· The cylinders have
uniform temperature
· The shaft slides
freely inside the bushing
· The ends of the
cylinder are free of force.
· Both the shaft and
cylinder have the same Young’s modulus E
and Poisson’s ratio
· The cylinder and
shaft are sufficiently long to ensure that a state of generalized plane strain
can be developed in each solid.
The displacements, strains and stresses in
the solid shaft (r<a) are
In the hollow cylinder, they are
Derivation: These results can be derived using the
solution to a pressurized cylinder given in Section 4.1.9. After the shaft is
inserted into the tube, a pressure p
acts to compress the shaft, and the same pressure pushes outwards to expand the
cylinder. Suppose that this pressure
induces a radial displacement in the solid cylinder, and a radial
displacement in the hollow tube. To accommodate the interference, the
displacements must satisfy
Evaluating the relevant displacements using
the formulas in 4.1.9 gives
Here, we have
assumed that the axial force acting on both the shaft and the tube must vanish
separately, since they slide freely relative to one another. Solving these two equations for p shows that
This pressure can then be substituted back
into the formulas in 4.1.9 to evaluate the stresses.
