5.2 Airy Function Solution to Plane Stress and Strain Static Linear
Elastic Problems
In this section we
outline a general technique for solving 2D static linear elasticity
problems. The technique is known as the
`Airy Stress Function’ method.
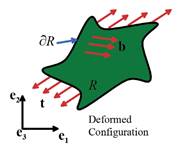 A typical plane
elasticity problem is illustrated in the figure. The solid is two
dimensional, which means either that
A typical plane
elasticity problem is illustrated in the figure. The solid is two
dimensional, which means either that
1. The solid is a thin
sheet, with small thickness h, and is
loaded only in the plane.
In this case the plane stress
solution is applicable
2. The solid is very
long in the direction, is prevented from stretching
parallel to the axis, and every cross section is loaded
identically and only in the plane.
In this case, the plane strain
solution is applicable.
Some additional basic assumptions and
restrictions are:
· The Airy stress function is applicable only to isotropic solids. We will assume that the solid has Young’s modulus E, Poisson’s ratio and mass density
· The Airy Stress function can only be used if the body force has a special
form. Specifically,
the requirement is
where
is a scalar
function of position. Fortunately, most
practical body forces can be expressed in this form, including gravity.
· The Airy Stress
Function approach works best for problems where a solid is subjected to
prescribed tractions on its boundary, rather than prescribed
displacements. Specifically, we
will assume that the solid is loaded by boundary tractions .
5.2.1 The Airy solution in rectangular coordinates
The Airy function procedure can then be
summarized as follows:
1. Begin by finding a
scalar function (known as the Airy potential) which satisfies:
where
In addition, must satisfy the following traction boundary
conditions on the surface of the solid
where are the components of a unit vector normal to
the boundary.
2. Given , the stress field within the region
of interest can be calculated from the formulas
3. If the strains are needed, they may
be computed from the stresses using the elastic stressstrain relations.
4. If the displacement field is needed,
it may be computed by integrating the strains, following the procedure
described in Section 2.2.15. An example
(in polar coordinates) is given in Section 5.2.4 below.
Although it is easier to solve for than it is to solve for stress directly, this
is still not a trivial exercise.
Usually, one guesses a suitable form for , as illustrated below. This may seem highly unsatisfactory, but
remember that we are essentially integrating a system of PDEs. The general procedure to evaluate any
integral is to guess a solution, differentiate it, and see if the guess was
correct.
5.2.2 Demonstration that the Airy
solution satisfies the governing equations
Recall that to solve a linear
elasticity problem, we need to satisfy the following equations:
· Displacementstrain relation
· Stressstrain relation
· Equilibrium Equation
where we
have neglected thermal expansion, for simplicity. We proceed to show that these equations are
satisfied.
1. We show first that the
Airy function satisfies the equilibrium equations automatically. For plane stress or plane strain conditions,
the equilibrium equations reduce to
Substitute for the
stresses in terms of to see that
so that the equilibrium
equations are satisfied automatically for any choice of .
2. To show that the strain-displacement equation
and the strain-displacement equation are satisfied, we first compute the
strains using the elastic stress-strain equations. Recall that
with for plane stress and for plane strain. Hence
Next, recall that the
straindisplacement relation is satisfied
provided that the strains obey the compatibility conditions
All but the first of
these equations are satisfied automatically by any plane strain or plane stress
field. We therefore need to show that the Airy representation satisfies the
first equation. To see this substitute
into the first compatibility equation in terms of stress to see that
Finally, substitute into
this horrible looking equation for stress in terms of and rearrange to see that
A few more weeks of
algebra reduces this to
This is the governing equation for
the Airy function so if the governing equation is satisfied,
then the compatibility equation is also satisfied.
This proves that the Airy
representation satisfies the governing equations. A second important question is is it possible to find an Airy function for all 2D plane stress and plane strain
problems? If not, the method would be
useless, because you couldn’t tell ahead of time whether existed for the problem you were trying to
solve. Fortunately, it is possible to
prove that all properly posed 2D elasticity problems do have an Airy
representation.
5.2.3 The Airy solution in
cylindrical-polar coordinates
 Boundary value problems involving
cylindrical regions are best solved using Cylindrical-polar coordinates. It is worth recording the Airy function
equations for this coordinate system.
Boundary value problems involving
cylindrical regions are best solved using Cylindrical-polar coordinates. It is worth recording the Airy function
equations for this coordinate system.
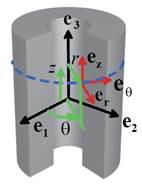
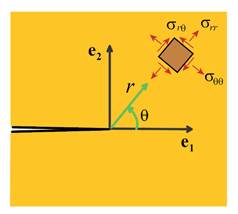
In a 2D cylindrical-polar coordinate
system, a point in the solid is specified by its radial distance from the origin and the angle .
The solution is independent of z. The Airy function is written as a function of
the coordinates as .
Vector quantities (displacement, body force) and tensor quantities
(strain, stress) are expressed as components in the basis shown in the figure.
The governing equation for the Airy function in this
coordinate system is
The state of stress is related to the Airy function by
In polar coordinates the strains are related to the stresses
by
for plane strain, while
for plane stress. The displacements must be determined by
integrating these strains following the procedure similar to that outlined in
Section 2.2.15. To this end, let denote the displacement vector. The strain-displacement relations in polar
coordinates are:
These can be integrated using a
procedure analogous to that outlined in Section 2.1.15. An example is given in Section 5.2.5.
In the following sections, we give
several examples of Airy function solutions to boundary value problems.
5.2.4 Airy function solution to the end loaded cantilever
Consider a cantilever beam, with
length L, height 2a and out-of-plane thickness b,
as shown below.

The beam is made from an isotropic
linear elastic solid with Young’s modulus and Poisson ratio . The top and bottom of the beam are traction free, the left hand end is
subjected to a resultant force P, and
the right hand end is clamped. Assume
that b<<a, so that a state of
plane stress is developed in the beam. An approximate solution to the stress in
the beam can be calculated from the Airy function
You can easily show that this
function satisfies the governing equation for the Airy function. The stresses
follow as
To see that this solution satisfies the boundary conditions,
note that
1. The top and bottom surfaces of the
beam are traction free ( ). Since the normal is in the direction on these surfaces, this requires
that .
The stress field clearly satisfies this condition.
2. The plane stress assumption
automatically satisfies boundary conditions on .
3. The traction boundary condition on
the left hand end of the beam ( ) was not specified in detail: instead, we
only required that the resultant of the traction acting on the surface is .
The normal to the surface at the left hand end of the beam is in the direction, so the traction vector is
The resultant force can be calculated
by integrating the traction over the end of the beam:
The stresses thus satisfy the
boundary condition. Note that by
Saint-Venant’s principle, other distributions of traction with the same
resultant will induce the same stresses sufficiently far ( ) from the end of the beam.
4. The boundary conditions on the right
hand end of the beam are not
satisfied exactly. The exact solution
should satisfy both and on .
The displacement field corresponding to the stress distribution was
calculated in the example problem in Sect 2.1.20, where we found that
where are constants that may be selected to satisfy
the boundary condition as far as possible.
We can satisfy and at some, but not all, points on .
The choice is arbitrary. Usually
the boundary condition is approximated by requiring at , .
This gives , and .
By Saint-Venant’s principle, applying other boundary conditions
(including the exact boundary
condition) will not influence the stresses and displacements sufficiently far
from the end.
5.2.5 2D Line load acting perpendicular to the surface of an infinite
solid
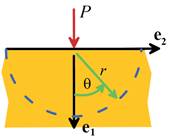 As a second example, the stress
fields due to a line load magnitude P per unit out-of-plane length
acting on the surface of a homogeneous, isotropic half-space can be generated
from the Airy function
As a second example, the stress
fields due to a line load magnitude P per unit out-of-plane length
acting on the surface of a homogeneous, isotropic half-space can be generated
from the Airy function
where are cylindrical polar coordinates illustrated
in the figure. The formulas in the
preceding section yield
The stresses in the basis are
The method outlined in section 5.2.3
can be used to calculate the displacements: the procedure is described in
detail below to provide a representative example. For plane strain deformation, we find
to within an arbitrary rigid
motion. Note that the displacements vary
as log(r) so they are unbounded both at the origin and at infinity. Moreover, the displacements due to any distribution
of traction that exerts a nonzero resultant force on the surface will also be
unbounded at infinity.
It is easy to see that this solution
satisfies all the relevant boundary conditions.
The surface is traction free ( ) except at r=0. To see that the
stresses are consistent with a vertical point force, note that the resultant
vertical force exerted by the tractions acting on the dashed curve shown in the
picture can be calculated as
The expressions for displacement can
be derived as follows. Substituting the
expression for stress into the stress-strain laws and using the
strain-displacement relations yields
Integrating
where is a function of to be determined. Similarly, considering the hoop stresses
gives
Rearrange and integrate with respect to
where is a function of to be determined. Finally, substituting for stresses into the
expression for shear strain shows that
Inserting the expressions for displacement and simplifying
gives
The two terms in parentheses are
functions of and r,
respectively, and so must both be separately equal to zero to satisfy this
expression for all possible values of and r.
Therefore
This ODE has solution
The second equation gives
which has solution .
The constants A,B,C represent
an arbitrary rigid displacement, and can be taken to be zero. This gives the required answer.
5.2.6 2D Line load acting parallel to the surface of an infinite solid
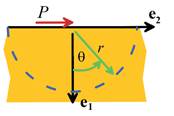 Similarly, the stress fields due to a
line load magnitude P per unit out-of-plane length acting tangent to the
surface of a homogeneous, isotropic half-space can be generated from the Airy
function
Similarly, the stress fields due to a
line load magnitude P per unit out-of-plane length acting tangent to the
surface of a homogeneous, isotropic half-space can be generated from the Airy
function
The formulas in the preceding section
yield
The method outlined in the preceding
section can be used to calculate the displacements. The procedure gives
to within an arbitrary rigid
motion.
The stresses and displacements in the basis are
5.2.7 Arbitrary pressure acting on a flat surface
 The principle of superposition can be
used to extend the point force solutions to arbitrary pressures acting on a
surface. For example, we can find the solution for a uniform pressure acting on
the strip of width 2a on the surface of a half-space by distributing the
point force solution appropriately. The
figure illustrates the problem to be
solved.
The principle of superposition can be
used to extend the point force solutions to arbitrary pressures acting on a
surface. For example, we can find the solution for a uniform pressure acting on
the strip of width 2a on the surface of a half-space by distributing the
point force solution appropriately. The
figure illustrates the problem to be
solved.
Distributing point forces with
magnitude over the loaded region shows that
5.2.8 Uniform normal pressure acting on a strip
For the particular case of a uniform pressure, the integrals
can be evaluated to show that
where and as shown below.

5.2.9 Stresses near the tip of a
crack
Consider an infinite solid, which
contains a semi-infinite crack on the (x1,x3)
plane, as illustrated below
Suppose that the solid deforms in
plane strain and is subjected to bounded stress at infinity. The stress field near the tip of the crack
can be derived from the Airy function
Here, and are two constants, known as mode I and mode II stress intensity factors,
respectively. They quantify the
magnitudes of the stresses near the crack tip, as shown below. Their role will
be discussed in more detail when we discuss fracture mechanics in Chapter 9.
The stresses can be calculated as
Equivalent
expressions in rectangular coordinates are
while the
displacements can be calculated by integrating the strains, with the result
Note that this displacement field is valid for plane
strain deformation only.
Observe
that the stress intensity factor has the bizarre units of .
