5.4 Solutions to 3D static problems in linear elasticity
The field equations of linear
elasticity are much more difficult to solve in 3D than in 2D. Nevertheless, several important problems have
been solved. In this section, we outline
a common representation for 3D problems, and give solutions to selected 3D problems.
5.4.1 Papkovich-Neuber Potential representations for 3D solutions for
isotropic solids
In this section we
outline a general technique for solving 3D static linear elasticity
problems. The technique is similar to
the 2D Airy function method, in that the solution is derived by differentiating
a potential, which is governed by a PDE.
Many other potential representations are used in 3D elasticity, but most
are simply special cases of the general Papkovich-Neuber representation.
 The figure illustrates a generic linear elasticity problem. Assume that
The figure illustrates a generic linear elasticity problem. Assume that
· The solid has Young’s modulus E, mass density and Poisson’s ratio .
· The solid is subjected to body force
distribution (per unit mass)
· Part of the boundary is subjected to prescribed displacements
· A second part of the boundary is subjected to prescribed tractions
The Papkovich-Neuber procedure can be
summarized as follows:
1. Begin by finding a
vector function and scalar function which satisfy
as well as boundary conditions
2. Calculate displacements from the
formula
3. Calculate stresses from the formula
HEALTH WARNING: Although the displacements and stresses that solve a linear elasticity
problem are unique, the Papkovich-Neuber potentials that generate a particular
solution are not. Consequently, if you
find several different sets of potentials in the literature that claim to solve
the same problem, don’t panic. It is
likely that they really do solve the same problem.
5.4.2 Demonstration that the Papkovich-Neuber solution satisfies the
governing equations
We need to show two things:
1. That the displacement field satisfies
the equilibrium equation (See sect 5.1.2)
2. That the stresses are related to the
displacements by the elastic stress-strain equations
To show the first result, differentiate the formula relating
potentials to the displacement to see that
Substitute this result into the governing equation to see
that

Finally, substitute the governing equations for the
potentials
and simplify the result to verify that the governing equation
is indeed satisfied. The second result can be derived by substituting the
formula for displacement into the elastic stress-strain equations and
simplifying.
5.4.3 Point force in an infinite solid
The displacements and stresses
induced by a point force acting at the origin of a large (infinite)
elastic solid with Young’s modulus E
and Poisson’s ratio are generated by the Papkovich-Neuber potentials
where . The displacements, strains and
stresses follow as
5.4.4 Point force normal to the surface of an infinite half-space
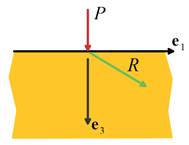 The figure shows a point force acting normal to the surface of a
semi-infinite solid with Young’s modulus E
and Poisson’s ratio . The displacements and stresses in
the half-space are generated by the Papkovich-Neuber potentials
The figure shows a point force acting normal to the surface of a
semi-infinite solid with Young’s modulus E
and Poisson’s ratio . The displacements and stresses in
the half-space are generated by the Papkovich-Neuber potentials
where
The displacements and stresses follow as

5.4.5 Point force tangent to the surface of an infinite half-space
 The figure shows a point force acting tangent to the surface of a
semi-infinite solid with Young’s modulus E
and Poisson’s ratio . The stresses and displacements in
the solids are generated by the Papkovich-Neuber potentials
The figure shows a point force acting tangent to the surface of a
semi-infinite solid with Young’s modulus E
and Poisson’s ratio . The stresses and displacements in
the solids are generated by the Papkovich-Neuber potentials
The displacements and stresses can be calculated from these
potentials as
5.4.6 The Eshelby Inclusion Problem
The Eshelby problem (Eshelby, 1957) is posed as follows:
1. Consider an infinite, isotropic,
linear elastic solid, with (homogeneous) Young’s modulus and Poisson’s ratio .
2. The solid is initially stress free,
with displacements, strains and stresses .
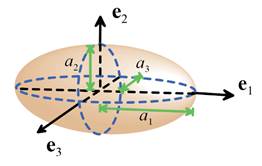
3. Some unspecified external agency then
induces a uniform `transformation strain inside an ellipsoidal region, with semi-axes centered at the origin (see the figure below)
The ‘transformation strain’ can be visualized as an anisotropic thermal
expansion if the ellipsoidal region were separated from
the surrounding elastic solid, it would be stress free, and would change its
shape according to the strain tensor .
4. Because the ellipsoid is encapsulated
within the surrounding elastic solid, stress, strain and displacement fields
are induced throughout the elastic solid.
These fields must be defined carefully because the initial configuration
for the solid could be chosen in a number of different ways. In the following, will denote the displacement of a material
particle from the initial, unstressed configuration, as the transformation
strain is introduced. The total strain
is defined as
Inside the ellipsoid, the
total strain consists of the transformation strain (which does not induce stress); together with
an additional elastic strain . Outside the ellipsoid, . The stress in the solid is related
to the elastic part of the strain by the usual linear elastic equations
The Eshelby solution gives full
expressions for these fields. It has
proved to be one of the most important solutions in all of linear elasticity:
it is of some interest in its own right, because it provides some insight into the
mechanics of phase transformations in crystals.
More importantly, a number of very important boundary value problems can
be solved by manipulating the Eshelby solution.
These include (i) the solution for an ellipsoidal inclusion embedded
within an elastically mismatched matrix; (ii) the solution for an ellipsoidal
cavity in an elastic solid; (iii) solutions for circular and elliptical cracks
in an elastic solid. In addition, the
Eshelby solution is used extensively in theories that provide estimates of
elastic properties of composite materials.
The displacement field is generated by Papkovich-Neuber
potentials
where the integral is taken over the
surface of the ellipsoid, denotes the components of a unit vector
perpendicular to the surface of the ellipsoid (pointing outwards); , and
is the
transformation stress (i.e. the stress that would be induced by applying an
elastic strain to the inclusion that is equal to the transformation strain). The stresses outside the inclusion can be
calculated using the standard Papkovich-Neuber representation given in Section
5.4.1. To calculate stresses inside the
inclusion, the formula must be modified to account for the transformation
strain, which gives
For the general ellipsoid, the
expressions for displacement and stress can be reduced to elliptic integrals,
with the results
Solution inside the ellipsoid: Remarkably, it turns out that the stresses and strains are
uniform inside the ellipsoid. The
displacements, strains and stresses can be expressed as:
(i) Displacement
(ii) Strain
(iii) Stress
Here, is a constant called the `Eshelby Tensor,’ and
is a second (anonymous) constant tensor. These
tensors can be calculated as follows. Choose the coordinate system so that . Define
where and
are elliptic integrals of the first and second kinds. Then
The remaining components of can be calculated by cyclic permutations of
(1,2,3). Any components that cannot be
obtained from these formulas are zero: thus , , etc. Note that has many of the symmetries of the elastic
compliance tensor (e.g ), but does not have major symmetry .
For certain special shapes the expressions given for break down and simplified formulas must be
used
Oblate spheroid
Prolate spheroid
Sphere . In this case
the Eshelby tensor can be calculated analytically
Additional terms follow from the
symmetry conditions .
The remaining terms are zero.
Cylinder . For this
case the Eshelby tensor reduces to
Additional terms follow from the
symmetry conditions .
The remaining terms are zero.
Solution outside the ellipsoid: The solution outside the ellipsoid can also be expressed in
simplified form: Eshelby (1959) shows that the displacement can be obtained
from a single scalar potential .
For actual calculations only the derivatives of the potential are
required, which can be reduced to
where is the greatest positive root of , with
and .
Additional derivatives can be computed using the relations
The displacements follow as
where
The remaining displacement components
can be calculated by cyclic permutations of (1,2,3), and strains and stresses
can be calculated by differentiating the displacements appropriately. The results are far too complicated to write
out in full, and in practice the algebra can only be done with the aid of a
symbolic manipulation program. Some
special results can be reduced to a tractable form, however:
Displacements far from
the ellipsoid
Solution outside a
spherical inclusion: For
this case the Papkovich-Neuber potentials can be reduced to
The displacements and stresses follow as
where and
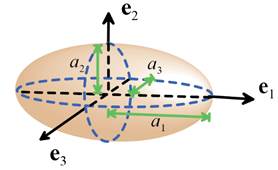
5.4.7 Elastically mismatched ellipsoidal inclusion in an infinite solid
subjected to remote stress
The figure below shows an ellipsoidal inclusion, with semi-axes .
The inclusion is made from an isotropic, elastic solid with Young’s
modulus and Poisson’s ratio .
It is embedded in an infinite, isotropic elastic matrix with Young’s
modulus and Poisson’s ratio .
The solid is loaded at infinity by a uniform stress state , strains and displacements .
The solution is constructed by superposing the Eshelby
solution to the uniform stress state. To
represent the Eshelby solution, we introduce:
1. The Eshelby transformation strain
2. The Eshelby tensor
3. The displacement induced by the Eshelby
transformation
4. The stresses induced by the Eshelby
transformation
The functions and can be calculated using the results given in
Section 5.4.6 (the elastic properties of the matrix should be used when
evaluating the formulas).
The solution for the solid containing the inclusion follows
as
where the transformation strain is
calculated by solving
for .
Here,
is the stiffness of the matrix, with a similar expression for
the stiffness of the inclusion.
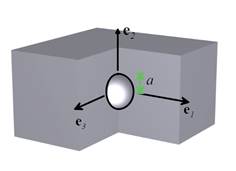
5.4.8 Spherical cavity in an infinite solid subjected to remote stress
The figure below shows a spherical cavity with radius a in an infinite, isotropic linear elastic solid. Far from the
cavity, the solid is subjected to a tensile stress , with all other stress components
zero.
The solution is generated by potentials
The displacements and stresses follow as
Derivation:
This solution can be derived by superposing two solutions:
1. A uniform state of stress , which can be generated from
potentials
,
2. The Eshelby solution for a sphere
with transformation stress .
The unknown coefficients A and B must be chosen to
satisfy the traction free boundary condition on the surface of the hole .
Noting that and working through some tedious algebra shows
that
Substituting back into the Eshelby
potentials and simplifying yields the results given. The same approach can be used to derive the
solution for a rigid inclusion in an infinite solid subjected to remote stress,
as well as the solution to an elastically mismatched spherical inclusion in an
infinite solid.
5.4.9 Flat ended cylindrical indenter in contact with an elastic
half-space
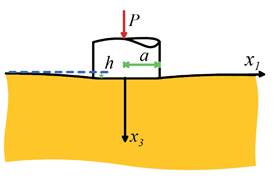 The figure shows a rigid, flat ended, cylindrical punch with radius a, which is pushed into the surface of
an elastic half-space with Young’s modulus E
and Poisson’s ratio by a force P. The indenter sinks into the surface by a
depth h. The interface between the
contacting surfaces is frictionless
The figure shows a rigid, flat ended, cylindrical punch with radius a, which is pushed into the surface of
an elastic half-space with Young’s modulus E
and Poisson’s ratio by a force P. The indenter sinks into the surface by a
depth h. The interface between the
contacting surfaces is frictionless
The load is related to the displacement of the punch by
The solution can be generated from Papkovich-Neuber
potentials
where , and denotes the imaginary part of z.
The displacements and stresses follow as
A symbolic manipulation program can handle the complex
arithmetic in these formulas without difficulty.
Important features of these results include:
1. Contact pressure: The pressure exerted by the indenter on the elastic solid follows as
2. Surface displacement: The vertical displacement of the surface is
3. Contact stiffness: the stiffness of a contact is defined as the ratio of the force acting on
the indenter to its displacement , and is of interest in practical
applications. The stiffness of a 3D
contact is well defined (unlike 2D contacts discussed in Section 5.4) and is
given by .
This turns out to be a universal relation for any axisymmetric contact
with contact radius a.
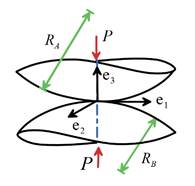
5.4.10 Frictionless contact between two elastic spheres
 This solution is known as the `Hertz
contact problem’ after its author. The
figure illustrates the problem to be solved.
Two elastic spheres, with radii and elastic constants , initially meet at a point, and are pushed into
contact by a force P. The two spheres deform so as to make contact
over a small circular patch with radius , and the centers of the two spheres
approach one another by a distance h.
This solution is known as the `Hertz
contact problem’ after its author. The
figure illustrates the problem to be solved.
Two elastic spheres, with radii and elastic constants , initially meet at a point, and are pushed into
contact by a force P. The two spheres deform so as to make contact
over a small circular patch with radius , and the centers of the two spheres
approach one another by a distance h.
The solution is conveniently expressed in terms of an
effective modulus and radius for the contact pair:
Relations between :
The force P, approach of
distant points h and contact area a are related by
Contact pressure: The two solids are subjected to
a repulsive pressure within the contact area. The maximum contact pressure is related to
the load applied to the spheres by
Contact stiffness: the stiffness of a contact is defined as the ratio of the force acting on
the indenter to its displacement , and is of interest in practical
applications. The stiffness of a 3D
contact is well defined (unlike 2D contacts discussed in Section 5.4) and is
given by .
This turns out to be a universal relation for any axisymmetric contact
with contact radius a.
Stress field: The
two spheres are subjected to the same contact pressure, and are both assumed to
deform like a half-space (with a flat surface).
Consequently, the stress field is identical inside both spheres, and can
be calculated from formulas derived by Hamilton, (1983)
where
The stresses on r=0
must be computed using a limiting process, with the result
Conditions to initiate yield: The material under the contact yields when the maximum
von-Mises effective stress reaches the uniaxial tensile yield stress Y.
The location of the maximum von-Mises stress can be found by plotting
contours of as a function of .
For the maximum value occurs at and has value .
Yield occurs when .
5.4.11 Contact area, pressure, stiffness and elastic limit for general non-conformal
contacts
A non-conformal contact has the
following properties: (i) the two contacting solids initially touch at a point
or along a line; (ii) both contacting solids are smooth in the neighborhood of
the contact, so that their local geometry can be approximated as ellipsoids,
(iii) the size of the contact patch between the two solids is much smaller than
either solid.
Complete solutions for such contacts
can be found in Bryant and Keer (1982) or Sackfield and Hills (1983). These papers also account for the effects of
friction under sliding contacts. The
results are lengthy. Here, we give
formulas that predict the most important features of frictionless nonconformal
contacts.
Contact Geometry: The geometry of the contacting
solids is illustrated below.

The geometry is characterized as follows:
1. The principal radii of curvature of
the two solids at the point of initial contact are denoted by , .
The radii of curvature are positive if convex and negative if concave.
2. The angle between the principal
directions of curvature of the two solids is denoted by . Note that while labels 1 and 2 can be assigned to the
radii of curvature of the two surfaces arbitrarily, must specify the angle between the two planes
containing the radii and .
3. Define the principal relative contact
radii as
4. Introduce an effective contact radius
Elastic constants: The two contacting solids are isotropic, with Young’s modulus and Poisson’s ratio .
Define the effective modulus
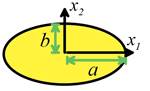 Contact area: The
area of contact between the two solids is elliptical, with semi-axes , as shown in the figure. The
dimensions of the contact area may be calculated as follows:
Contact area: The
area of contact between the two solids is elliptical, with semi-axes , as shown in the figure. The
dimensions of the contact area may be calculated as follows:
1. Solve the following equation
(numerically) for , with
where and are complete elliptic integrals of the first
and second kind
2. Calculate the contact area from
3. The dimensions of the contact patch
follow as
Contact pressure: The contact pressure distribution is
ellipsoidal, with the form
Approach of contacting solids: Points distant from the contact in the two solids approach
one another by a displacement
Contact stiffness: The contact stiffness is defined as and is given by
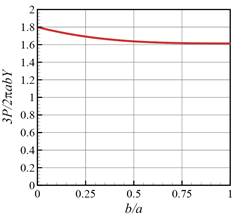
Elastic Limit: The
stresses in both solids are identical, and therefore yield occurs first in the
solid with the lower yield stress. The
graph below shows the critical load required to cause yield in a solid with
Von-Mises yield criterion, and uniaxial tensile yield stress Y, based on tabular values in Johnson
(1985)
5.4.12 Load-displacement-contact area relations for arbitrarily shaped
axisymmetric contacts
The most important properties of
general frictionless axisymmetric contacts can be calculated from simple
formulas, even when full expressions for the stress and displacement fields
cannot be calculated.

The figure above illustrates
the problem to be solved. Assume that:
1. The two contacting solids have
elastic constants .
Define an effective elastic constant as
2. The surfaces of the two solids are
axisymmetric near the point of initial contact.
3. When the two solids just touch, the
gap between them can be described by a monotonically increasing function , where r is the distance from the point of initial contact. For example, a
cone contacting a flat surface would have , where is the cone angle; a sphere contacting a flat
surface could be approximated using where D is the sphere diameter. In the following we will use
4. The two solids are pushed into
contact by a force P. The solids deform so as to make contact over
a circular region with radius a, and
move together by a distance h as the
load is applied.
5. The relationship between h and the contact radius a will be specified by a functional
relationship of the form h=H(a). The derivative of this function with respect
to its argument will be denoted by
These quantities are related by the following formulas:
1. Approach as a function of contact
radius
2. Applied force as a function of
contact radius
3. Contact stiffness
4. Contact pressure distribution
Once these formulas have been evaluated
for a given contact geometry the results can be combined to determine other
relationships, such as contact radius or stiffness as a function of load or
approach h.
