5.5 Solutions to dynamic problems for isotropic linear elastic solids
Dynamic problems are even more
difficult to solve than static problems.
Nevertheless, analytical solutions have been determined for a wide range
of important problems. There is not
space here to do justice to the subject, but a few solutions will be listed to
give a sense of the general features of solutions to dynamic problems.
5.5.1 Love potentials for dynamic solutions for isotropic solids
 In this section we
outline a general potential representation for 3D dynamic linear elasticity
problems. The technique is similar to
the 3D Papkovich-Neuber representation
for static solutions outlined in Section 5.4.
In this section we
outline a general potential representation for 3D dynamic linear elasticity
problems. The technique is similar to
the 3D Papkovich-Neuber representation
for static solutions outlined in Section 5.4.
The figure shows a generic problem of
interest. Assume that
· The solid has Young’s modulus E, mass density and Poisson’s ratio .
· Define longitudinal and shear wave
speeds (see Sect 4.4.5)
·
Body
forces are neglected (a rather convoluted procedure exists for problems
involving body force)
·
The
solid is assumed to be at rest for t<0
·
Part
of the boundary is subjected to time dependent prescribed
displacements
·
A
second part of the boundary is subjected to prescribed tractions
The procedure can be summarized as follows:
1. Find a vector
function and a scalar
function which satisfy
as well as boundary conditions
and initial conditions .
2. Calculate displacements from the
formula
3. Calculate stresses from the formula
You can easily show that this
solution satisfies the equations of motion for an elastic solid, by
substituting the formula for displacements into the Cauchy-Navier equation
The details are left as an
exercise. More importantly, one can
also show that the representation is complete,
i.e. all dynamic solutions can be derived from some appropriate combination of
potentials.
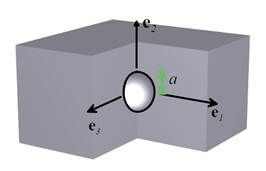
5.5.2 Pressure suddenly applied to the surface of a spherical cavity in
an infinite solid
The figure below shows a spherical
cavity with radius a in an infinite
elastic solid with Young’s modulus E
and Poisson’s ratio .
The solid is at rest for t<0. A time t=0,
a pressure p is applied to the
surface of the hole, and thereafter held fixed.
The solution is generated by Love
potentials
where
The displacements and stresses follow as
The radial and hoop stresses at several time intervals are
plotted below.
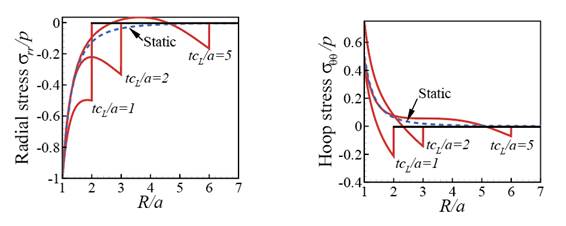
Observe that
1. A wave front propagates out from the
cavity at the longitudinal wave speed ;
2. Unlike the simple 2D wave problems
discussed in Section 4.4, the stress is not constant behind the front. Instead, each point in the solid experiences a
damped oscillation in displacement and stress that eventually decays to the
static solution;
3. Both the radial and hoop stress
reverse sign as the wave passes by. For
this reason dynamic loading can cause failures to occur in very unexpected
places;
4. The maximum stress induced by dynamic
loading substantially exceeds the static solution.
5.5.3 Rayleigh waves
A Rayleigh wave is a special type of
wave which propagates near the surface of an elastic solid. Assume that
· The solid is an isotropic, linear
elastic material with Young’s modulus , Poisson’s ratio and mass density
· The solid has shear wave speed and longitudinal wave speed
· The surface is free of tractions
· A Rayleigh wave with wavelength propagates in the
direction, as shown below
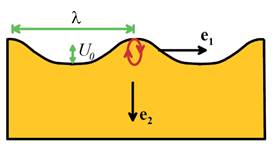
The displacement and stress due can be derived from Love
potentials
where , is the amplitude of the vertical displacement
at the free surface, is the wavenumber
and is the Rayleigh wave speed, which is the
positive real root of
This equation can easily be solved for
with a symbolic manipulation program, which
will most likely return 6 roots. The root
of interest lies in the range for . The solution can be approximated by
with an error of less than 0.6% over the full
range of Poisson ratio.
The nonzero components of displacement and stress follow as
You can use either the real or
imaginary part of these expressions for the displacement and stress fields
(they are identical, except for a phase difference). Of course, if you choose
to take the real part of one of the functions, you must take the real part for
all the others as well. Note that substituting in the expression for and setting yields the equation for the Rayleigh wave
speed, so the boundary condition is satisfied. The variations with depth of stress amplitude
and displacement amplitude are plotted below.

Important features of this solution
are
1. The wave is confined to a layer near
the surface with thickness about twice the wavelength.
2. The horizontal and vertical
components of displacement are 90 degrees out of phase. Material particles therefore describe
elliptical orbits as the wave passes by.
3. The speed of the wave is independent
of its wavelength that is to say, the wave is non-dispersive.
4. Rayleigh waves are exploited in a
range of engineering applications, including surface acoustic wave devices;
touch sensors; and miniature linear motors.
They are also observed in earthquakes, although these waves are observed
to be dispersive, because of density variations of the earth’s surface.
5.5.4 Love waves
 Love waves are a second form of
surface wave, somewhat similar to Rayleigh waves, which propagate through a
thin elastic layer bonded to the surface of an elastic half space, as shown in
the figure Love waves involve motion
perpendicular to the plane of the figure.
Love waves are a second form of
surface wave, somewhat similar to Rayleigh waves, which propagate through a
thin elastic layer bonded to the surface of an elastic half space, as shown in
the figure Love waves involve motion
perpendicular to the plane of the figure.
Assume that
· The layer has thickness H, shear modulus and shear wave speed
· The substrate has shear modulus and shear wave speed
· The wave speeds satisfy
The displacement and stress
associated with a harmonic Love wave with wavelength which propagates in the direction can be derived from Love potentials
where is the amplitude of the vertical displacement
at the free surface, is the wavenumber;
and is the wave speed (also known as the phase velocity) of the wave, which is
given by the positive real roots of
This relationship is very unlike the equations for wave
speeds in unbounded or semi-infinite solids, and leads to a number of
counter-intuitive results. Note that
1. The wave speed depends on its
wavelength. A wave with these properties
is said to be dispersive, because a
pulse consisting of a spectrum of harmonic waves tends to spread out;
2. The wave speed is always faster than
the shear wave speed of the layer, but less than the wave speed in the
substrate;
3. If a wave with wavenumber propagates at speed c, then waves with wavenumber where n is
any integer, also propagate at the same speed.
These waves are associated with different propagation modes for the wave.
Each propagation mode has a characteristic displacement distribution
through the thickness of the layer, as discussed below.
4. A wave with a particular wave number
can propagate at several different speeds, depending on the mode. The number of modes that can exist at a
particular wave number increases with the wave number. You can see this in the plot of wave speed v- wave number below.
5. Dispersive wave motion is often
characterized by relating the frequency of
the wave to its wave number, rather than by relating wave speed to wave
number. The (angular) frequency is
related to wave number and wave speed by the usual formula . Substituting this result into the equation for
wave speed yields the Dispersion Relation
for the wave
The nonzero displacement component is
The nonzero stresses in the layer can
be determined from , but the calculation is so trivial
the result will not be written out here.
The wave speed is plotted as a function of wave number in the graph
below, for the particular case , .
The displacement amplitude a function of depth is shown for several
modes is shown below on the right.

5.5.5 Elastic waves in waveguides
 The surface layer discussed in the
preceding section is an example of a waveguide: it is a structure which causes
waves to propagate in a particular direction, as a result of the confining
effect of its geometry.
The surface layer discussed in the
preceding section is an example of a waveguide: it is a structure which causes
waves to propagate in a particular direction, as a result of the confining
effect of its geometry.
The figure shows a much simpler
example of a waveguide: it is a thin sheet of material, with thickness H and infinite length in the and directions.
The strip can guide three types of wave:
1. Transverse waves, which propagate in
the direction with particle motion in the direction;
2. Flexural waves, which propagate in
the direction with particle motion in the direction;
3. Longitudinal waves, which propagate
in the direction with particle motion in the direction.
The solutions for cases 2 and 3 are
lengthy, but the solution for case 1 is simple, and can be used to illustrate
the general features of waves in waveguides.
For transverse waves:
1. The wave can be any member of the
following family of possible displacement distributions
where n=0,1,2…, and you can use either the real or imaginary part as the
solution. This displacement represents a harmonic wave that has wavenumber where is the wavelength in the direction, which propagates in the direction with speed c. The variation of
displacement with at any fixed value of is a standing wave with wavelength and angular frequency . Each value of n corresponds to a different propagation mode.
2. The speed of wave propagation
(usually referred to as the phase
velocity of the wave) satisfies
3. The wave speeds for modes with n>0 depend on the wave number: i.e.
the waves are dispersive;
4. There are an infinite number of
possible wave speeds for each wave number. Each wave speed is associated with a
particular propagation mode n.
5. The formula for wave speed can be
re-written as an equation relating the angular frequency to the wave number k.
This is called the dispersion relation for the wave.
6. Dispersive waves have a second wave
speed associated with them called the Group
Velocity. This wave speed is defined as the slope
of the dispersion relation (in contrast, the phase velocity is ). For
the waveguide considered here
The group velocity, like the phase
velocity, depends on the propagation mode and the wave number. The group velocity has two physical interpretations
(i) it is the speed at which the energy in a harmonic wave propagates along the
waveguide; and (ii) it is the propagation speed of an amplitude modulated wave
of the form
where and are the wave number and frequency of the
modulation, and are the wavenumber and frequency of the
carrier wave. The carrier wave
propagates with speed , while the modulation (which can be
regarded as a `group’ of wavelets) propagates at speed .
Note that for a non-dispersive wave, the group and phase velocities are
the same.
