5.6 Energy methods for solving static linear
elasticity problems
You may recall that energy methods
can often be used to simplify complex problems.
For example, to find the equilibrium configuration of a discrete system,
you would begin by identifying a suitable set of generalize coordinates , and then express the potential
energy in terms of these: .
The equilibrium values of the generalized coordinates could then be
determined from the condition that the potential energy is stationary at
equilibrium: this gives a set of equations that could be solved for .
In this section, we will develop an
analogous procedure for solving boundary value problems in linear
elasticity. Our generalized coordinates
will be the displacement field .
We will find an expression for the potential energy of an elastic solid
in terms of , and then show that the potential
energy is stationary if the solid is in equilibrium. We will find, further, that the potential
energy is not only stationary, but is always a minimum, implying that
equilibrium configurations in linear elasticity problems are always stable.
(This is because the approximations made in setting up the equations of
linear elasticity preclude any possibility of buckling). This principle will be referred to as the Principle of Minimum Potential Energy.
The main application of the principle
is to generate approximate solutions to linear elastic
boundary value problems. Indeed, the
principle will form the basis of the Finite Element Method in linear
elasticity.
5.6.1 Definition of the potential energy of a linear elastic solid under
static loading
 In the following, we consider a
generic static boundary value problem in linear elasticity, as shown in the
figure.
In the following, we consider a
generic static boundary value problem in linear elasticity, as shown in the
figure.
As always, we assume that we are given:
1. The shape of the solid in its
unloaded condition
2. The initial stress field in the solid
(we will take this to be zero)
3. The elastic constants for the solid and its mass density
4. The thermal expansion coefficients
for the solid, and temperature change from the initial configuration
5. A body force distribution (per unit mass) acting on the solid
6. Boundary conditions, specifying
displacements on a portion or tractions on a portion of the boundary of R
Kinematically
Admissible Displacement Fields
A ‘kinematically admissible
displacement field’ is any displacement field with the following
properties:
1. is continuous everywhere within the solid
2. is differentiable everywhere within the solid,
so that a strain field may be computed as
3. satisfies boundary conditions anywhere that
displacements are prescribed, i.e. on the portion on the boundary.
Note that v is not necessarily the actual displacement in the solid it is just an arbitrary displacement field
which satisfies any displacement boundary conditions. You can think of it as a possible displacement field that the solid could adopt. Out of all
these possible displacement fields, it will actually select the one that
minimizes the potential energy.
The kinematically
admissible displacement field can also be thought of as a system of generalized
coordinates in the context of analytical mechanics. Recall that, to use a set of generalized
coordinates in Lagranges equations, you must make sure that the system of
coordinates satisfies all the constraints.
Similarly, to be admissible, our displacement field must satisfy
constraints on the boundary.
Definition
of Potential Energy of an Elastic Solid
Next, we will define
the potential energy of a solid. The
definition may look a bit strange, because it seems to give different values
for potential energy depending on whether it is subjected to prescribed forces
or displacements. This is true. But who cares, as long as the definition is
useful?
For any kinematically admissible
displacement field v, the potential
energy is
where
is the strain energy density
associated with the kinematically admissible displacement field. You can
interpret the three terms in the formula for V as the strain energy stored inside the solid; the work done by
body forces; and the work done by surface tractions. For the particular case of
an isotropic material, with , we see that
5.6.2 The principle of stationary and minimum potential energy.
Let v be any kinematically admissible displacement field. Let u
be the actual displacement field i.e. the one that satisfies the equilibrium
equations within the solid as well as all the boundary conditions. We will show the following:
1. V(v) is stationary (i.e. a local minimum, maximum or inflexion point)
for v=u.
2. V(v) is a global minimum for v=u.
As a preliminary step, recall that the actual displacement
field satisfies the following equations
Next, re-write the kinematically admissible displacement
field in terms of u as
where is the difference between the kinematically
admissible field and the correct equilibrium field. Observe that
i.e. the difference between the
kinematically admissible field and the actual field is zero wherever
displacements are prescribed.
Now, note that can be expressed in terms of and as
where
To see this, simply substitute into the definition of the
potential energy
Multiply everything out and use the condition that to get the result stated.
Now, to show that is stationary at v=u, we need to show that .
This means that, if we add any small change to the actual displacement field u, the change in potential energy will
be zero, to first order in .
To show this, note that
Next, note that
where we have used the fact that (angular momentum balance). Rewrite this as
Substitute back into the expression for and rearrange to see that
Now, recall the equations of equilibrium
so that the second term
vanishes. Apply the divergence theorem
to express the first integral as a surface integral
Recall that , and note that
because either tractions or
displacements (but not both) must be prescribed on every point on the boundary.
Therefore
Finally, recall that
and substitute back into the expression for to see that
This proves that V(v) is stationary at v=u, as stated.
Finally, we wish to show that V(v)
is a minimum at v=u. This is easy.
Note that we have proved that
Note that
is the strain energy density
associated with a strain .
Strain energy density must always be positive or zero, so that
5.6.3 Uniaxial compression of a cylinder solved by energy methods
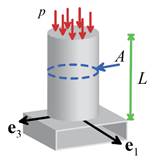 Consider a cylindrical bar subjected
to a uniform pressure p on one end,
and supported on a rigid, frictionless base, as shown in the figure. Neglect temperature changes. Determine the displacement field in the bar.
Consider a cylindrical bar subjected
to a uniform pressure p on one end,
and supported on a rigid, frictionless base, as shown in the figure. Neglect temperature changes. Determine the displacement field in the bar.
We will solve this problem using energy
methods. We will guess a displacement
field of the form
This satisfies the
boundary conditions on the bottom face of the cylinder, so it is a
kinematically admissible displacement field.
The coefficients are to be determined, by minimizing the
potential energy. The strains follow as
with all other strain components zero. The strain energy density is
The boundary conditions are
1. On the bottom of the cylinder
2. On the sides of the cylinder,
3. On the top of the cylinder
Substitute into the expression for strain energy density to
see that
Now, the actual displacement field minimizes V.
This requires
Evaluate the derivatives to see that
It is easy to solve these equations
to see that
This is, of course, the exact
solution, which is reassuring. Notice that
we never had to calculate stresses or worry about equilibrium the variational principle takes care of all
that for us.
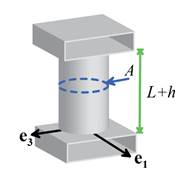 Let us solve the same problem, but
this time with displacement boundary
conditions on the top of the cylinder, as shown in the figure.
Let us solve the same problem, but
this time with displacement boundary
conditions on the top of the cylinder, as shown in the figure.
The cylinder has
unstretched length L and is stretched
between frictionless grips to length L+h. This time, the kinematically admissible
displacement field must satisfy boundary conditions on both top and bottom
surface of the cylinder. Therefore, we
choose
Proceeding as before, we now find that the
potential energy is
Note that this time there is no
contribution to the potential energy from the tractions on the top of the
cylinder, because now the displacement is
prescribed there, instead of the pressure.
Minimizing the potential energy as before
Solve these equations to conclude that
Again, this is the exact solution.
5.6.4 Variational derivation of the beam equations
Variational methods can be used to
solve boundary value problems exactly, as described in the preceding
section. The real power of variational
methods, however, is to provide a systematic way to find approximate solutions
to boundary value problems.
We will illustrate this by
re-deriving the equations governing beam bending theory using the principle of
minimum potential energy.
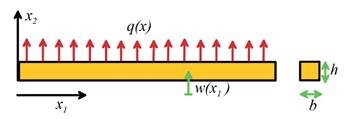
Consider a slender rod with
rectangular cross section, subjected to uniform pressure q(x) on its top surface, as shown above. Assume that the rod is an
isotropic, linear elastic solid with Young’s modulus E and Poisson’s ratio . The boundary conditions at the ends
of the bar will be left unspecified for the time being.

We proceed by approximating the strain
field within the bar. The figure above shows the deflected beam. We will
suppose that the strains at any given cross section are completely
characterized by the local curvature of the beam, so that at a given cross
section x
Here, is the height of a fiber in the beam whose
length is unchanged: must be determined as part of the solution.
The displacement and strain fields
are therefore completely characterized by and R(x).
Rather than solve for R, we will
approximate the curvature at x by the
second derivative of the vertical deflection w, so that
Now, we want to find w(x) and
that will best approximate the actual
displacement field within the bar. We
will do this by choosing w and so as to minimize the potential energy of the
solid.
Begin by computing the potential energy. It is straightforward to show that the strain
energy density is
Hence
Here, we have neglected the small additional deflection of
the beam surface due to
We now wish to minimize V
with respect to w and .
Do the latter first:
which is evidently satisfied for any w by choosing
This is the usual expression for the
position of the neutral axis of a beam. We can now simplify our expression for
potential energy by defining
so that
Now turn to the more difficult
problem of finding w that will
minimise V. To do this, let us calculate the change in V when is changed slightly to
Expand this out to see that
Now, if V(w) is a minimum, then
We are none the wiser as a result of this
exercise, but if we integrate the first integral by parts twice, we find that
Since this is zero for any we conclude that
to ensure that the third term in this
expression vanishes. This gives us the
required governing equation for w. However, we still need to deal with the first
two boundary terms.
There are several ways to prescribe
boundary conditions on the ends of the beam to ensure that V is stationary.
1. We may prescribe w and its first derivative.
In this case the variation in must satisfy to ensure that w is a kinematically admissible displacement. The boundary terms are zero under these
conditions
2. Prescribe only the value of w. In this case we must ensure that on the end of the beam. The second boundary term is automatically zero. To ensure that the first boundary term is
zero we must set
to ensure that V is stationary. We know from elementary strength of materials
courses that this is equivalent to the condition that the shear force vanishes
on the end of the beam.
3. Prescribe only the value of .
In this case, we must ensure that so that is a kinematically admissible
displacement. The first boundary term
vanishes; while the second boundary term is zero if we choose
This is equivalent to setting the
bending moment to zero at the end of the beam.
Clearly, one could extend this
procedure to account for tractions acting on the ends of the beam. The details are left as an exercise. A nice feature of the variational approach
that we followed here is that the appropriate boundary conditions follow
naturally from the variational principle (indeed, the boundary conditions are
called `natural’ boundary conditions).
This turns out to be particularly helpful in setting up approximate
theories of plates and shells, where the boundary conditions can be very
difficult to determine consistently using any other method.
5.6.5 Energy methods for calculating stiffness
Energy methods can also be used to calculate
an upper bound to the stiffness of a structure or a component.
A spring is an example of an elastic
solid. Recall that if you apply a force P to a spring, it deflects by an amount , in proportion to P.
The stiffness k is defined so
that
If you apply a load P to any
stable elastic structure (except one which contains two or more contacting
surfaces, or if the forces are too large for linear elasticity theory to be
applicable), the point where you apply the load will deflect by a distance that
is proportional to the applied load. For
example, for the cantilever beam shown below the end deflection is
The stiffness of the beam is therefore

To get an upper bound to the
stiffness of a structure, one can merely guess its deformed shape, then apply
the principle of minimum potential energy.
For example, for the beam problem, we might guess that the
beam deforms into a circular shape, with unknown radius R, as shown below

The deflection at the end of the beam is
approximately
From the preceding section, we know that the
potential energy of a beam is
Here, , but we need to account for the
potential energy of the load P. Recall that the potential energy of a
constant force is . Recall also that . Thus
Choose R to
minimize the potential energy
so that
For comparison, the exact solution is
