5.7 The Reciprocal Theorem and applications
The reciprocal
theorem is a distant cousin of the principle of minimum potential energy, and
is a particularly useful tool. It is the
basis for a computational method in linear elasticity called the boundary
element method; it can often be used to extract information concerning
solutions to a boundary value problem without having to solve the problem in
detail; and can occasionally be used to
find the full solution for example, the reciprocal theorem provides a
way to compute fields for arbitrarily shaped dislocation loops in an infinite
solid.
5.7.1 Statement and proof of the reciprocal theorem
The reciprocal
theorem relates two solutions for the same elastic solid, when subjected to
different loads.
To this end,
consider the following scenario
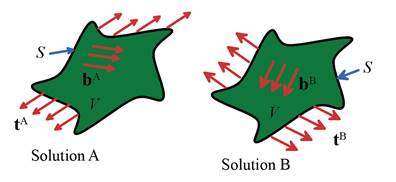
1. An elastic solid which occupies some region V with boundary S, as shown above. The
outward normal to the boundary is specified by a unit vector . The properties of the solid are characterized
by the tensor of elastic moduli and mass density . The solid is free of stress when unloaded,
and temperature changes are neglected.
2. When subjected to body forces (per unit mass) together with prescribed
displacements on portion of its boundary, and tractions on portion , a state of static
equilibrium is established in the solid with displacements, strains and
stresses
3. When subjected to body forces together with prescribed displacements on portion of its boundary, and tractions on portion , the solid
experiences a static state
The reciprocal theorem relates the two
solutions through
Derivation:
Start by showing that . To see this, note that , where we have used
the symmetry relation .
To prove the rest, recall that
1. The divergence
theorem requires that
2. Any pair of strains and displacement
are related by
3. The stress tensor is
symmetric, so that
4. Both stress states satisfy the equilibrium equation . Consequently, collecting together
the volume integrals gives
5. Note that this
result applies to any equilibrium stress field and pair of compatible strain
and displacements the stresses need not be related to the
strains. Consequently, this result can
be applied to pairs of stress and displacement
5.7.2 Simple example using the reciprocal theorem
 The reciprocal theorem can often be
used to extract average measures of
deformation or stress in an elastic solution.
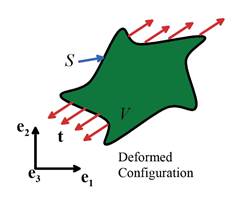
As an example, consider the following problem: An elastic solid with Young’s modulus E and Poisson’s ratio occupies a volume V with surface S, as
shown in the figure. The solid is
subjected to a distribution of traction on its surface. The traction exerts zero resultant force and
moment on the solid, i.e.
The reciprocal theorem can often be
used to extract average measures of
deformation or stress in an elastic solution.
As an example, consider the following problem: An elastic solid with Young’s modulus E and Poisson’s ratio occupies a volume V with surface S, as
shown in the figure. The solid is
subjected to a distribution of traction on its surface. The traction exerts zero resultant force and
moment on the solid, i.e.
As a result, a state of static
equilibrium with displacement, strain and stress is developed in the solid. Show that the volume change of the solid can
be calculated as
Derivation:
1. Note that if we were able to
determine the full displacement field in the solid, the volume change could be
calculated as
If you don’t see this result
immediately on geometric grounds it can be derived by first calculating the
total volume change by integrating the dilatation over the volume of the solid
and then applying the divergence theorem
2. Note that we can make one of the
terms in the reciprocal theorem reduce to this formula by choosing state A to be the actual displacement, stress
and strain in the solid, and choosing state B
to be a uniform stress with unit magnitude . This stress is clearly an
equilibrium field, for zero body force. The corresponding strains and
displacements follow as
where and represent an arbitrary infinitesimal displacement
and rotation.
3. Substituting into the reciprocal
theorem, recalling that the stresses satisfy the boundary condition , and using the equilibrium equations
for the traction then yields
5.7.3 Formulas relating internal and boundary values
of field quantities
The reciprocal theorem also gives a
useful relationship between the values of stress and displacement in the
interior and on the boundary of the solid, which can be stated as follows. Suppose that a linear elastic solid with
Young’s modulus E and Poisson’s ratio
is loaded on its boundary (with no body force)
so as to induce a static equilibrium displacement, strain and stress field in the solid.
Define the following functions
You may recognize the first two of
these functions represent the displacements and stresses induced at a point by a point force of unit magnitude acting in
the direction at the origin of an infinite solid.
The displacement and stress at an interior point in the solid
can be calculated from the following formulas
Here, denotes that the integral is taken with
respect to x, holding fixed.
At first sight this appears to give
an exact formula for the displacement and stress in any 3D solid subjected to
prescribed tractions and displacement on its boundary. In fact this is not the case, because you
need to know both tractions and displacements
on the boundary to evaluate the formula, whereas the boundary conditions only
specify one or the other. The main
application of this formula is a numerical technique for solving elasticity
problems known as the ‘boundary element
method.’ The idea is simple: the
unknown values of traction and displacement on the boundary are first
calculated by letting the interior point approach the boundary, and solving the
resulting integral equation. Then, the
formulas are used to calculate field quantities at interior points.
Derivation: These formulas are a consequence of
the reciprocal theorem, as follows
1. Start with the reciprocal theorem:
2. For state A we choose the actual stress, strain
and displacement in the solid. For state
B, we choose the displacement and
stress fields induced by a Dirac Delta distribution of body force located at
position . The body force vector associated with a force acting in the direction will be denoted by , and has the
property that
The stress and
displacement induced by this body force can be calculated by shifting the
origin in the point force solution given in Section 5.4.3. Substituting into the reciprocal theorem
immediately yields the formula for displacements.
3. The formula for
stress follows by differentiating the displacement with respect to to calculate the strain, and then substituting
the strain into the elastic stress-strain equation and simplifying the result.
5.7.4 Classical Solutions for displacement and stress
due to a 3D dislocation loop in an infinite solid
 The reciprocal theorem can also be
used to calculate the displacement and stress induced by an arbitrarily shaped
3D dislocation loop in an infinite solid.
The concept of a dislocation in a crystal was introduced in Section
5.3.4. A three-dimensional dislocation
in an elastic solid can be constructed as follows:
The reciprocal theorem can also be
used to calculate the displacement and stress induced by an arbitrarily shaped
3D dislocation loop in an infinite solid.
The concept of a dislocation in a crystal was introduced in Section
5.3.4. A three-dimensional dislocation
in an elastic solid can be constructed as follows:
1. Consider an infinite solid with
Young’s modulus and Poisson’s ratio .
Assume that the solid is initially stress free.
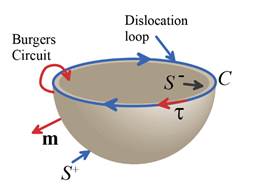
2. Introduce a bounded, simply connected
surface S inside the solid (see the
figure above) Denote the edge of this
surface by a curve C this curve will correspond to the dislocation
line. The direction of the line will be
denoted by a unit vector tangent to the curve. There are, of course, two possible choices
for this direction. Either one can be used.
The normal to S will be
denoted by a unit vector , which must be chosen so that the
curve C encircles m in a counterclockwise sense when
traveling in direction .
3. Create an imaginary cut on S, so that the two sides of the cut are
free to move independently. In the
derivation below, the two sides of the cut will be denoted by and , chosen so that the unit vector points from to .
4. Hold fixed, displace by the burgers vector b, and weld the two sides of the cut back together. Remove the constraint on .
This procedure creates a displacement
field that is consistent with the Burger’s circuit convention described in
Section 5.3.4. To see this, suppose that
a crystal lattice is embedded within the elastic solid. Perform a Burgers circuit around the curve C. Start the circuit on , encircle the curve according to the
right hand screw convention with respect to the line sense , and end at .
The end of the circuit is displaced by a distance b from the start, so that .
The displacement and stress due to the dislocation loop can
be calculated from
where is defined in Section 5.8.3, and is the permutation symbol. The symbols denotes that is varied when evaluating the surface or line
integral. These results are also often
expressed in the more compact form
where .
Derivation:
1. Start with the reciprocal theorem
2. For state A, choose the actual stress
and displacement in the solid containing the dislocation loop. For state B, choose the stress, strain and
displacement induced by a Dirac delta distribution of body force acting in the direction at position in the solid.
The displacements and stresses due to a Dirac delta distribution of body
force are denoted by the functions and defined in the preceding section.
3. When evaluating the
reciprocal theorem, the two sides of the cut are treated as separate surfaces.
Substituting into the reciprocal theorem and using the properties of the delta
distribution gives
where and denote the outward normals to the two sides of
the cut, and denote the limiting values of the displacement
field for the dislocation solution on the two sides of the cut.
4. Substituting for n, collecting together the surface integrals and noting that and are continuous across S gives
Finally, noting that (the burgers vector is the displacement of a
material point at the end of the burgers circuit as seen from a point at the
start) and that yields the formula for displacements.
5. To calculate the stress, start by
differentiating the displacement to see that
6. Next, observe that this can be
expressed as an integral around the dislocation line
To see this, recall
Stoke’s theorem, which states that
for any
differentiable vector field , integrated over a
surface S with normal m that is bounded by curve C. Apply this to the line integral, use , note that because is a static equilibrium stress field, and
finally note that .
7. Finally, calculate the stress using
the elastic stress-strain equation
8. The alternative forms for the
displacement and stress follow by noting that
