5.9 Rayleigh-Ritz method for estimating natural
frequency of an elastic solid
We conclude this chapter by
describing an energy based method for estimating the natural frequency of
vibration of an elastic solid.
5.9.1 Mode shapes and natural frequencies; orthogonality of mode shapes
and Rayleighs Principle
It is helpful to review the
definition of natural frequencies and mode shapes for a vibrating solid. To this end, consider a representative
elastic solid say a slender beam that is free at both ends,
as illustrated below.

The physical significance of the mode shapes
and natural frequencies of the vibrating beam can be visualized as follows:
1. Suppose that the beam is made to
vibrate by bending it into some (fixed) deformed shape ; and then suddenly releasing
it. In general, the resulting motion of
the beam will be very complicated, and may not even appear to be periodic.
2. However, there exists a set of
special initial deflections , which cause every point on the beam
to experience simple harmonic motion at some (angular) frequency , so that the deflected shape has the
form .
3. The special frequencies are called the natural frequencies of
the system, and the special initial deflections are called the mode shapes.
4. A continuous system always has an
infinite number of mode shapes and natural frequencies. The vibration
frequencies and their modes are conventionally ordered as a sequence with .
The lowest frequency of vibration is denoted . The mode shapes for the lowest
natural frequencies tend to have a long wavelength; the wavelength decreases
for higher frequency modes. If you are
curious, the exact mode shapes and natural frequencies for a vibrating beam are
derived in Section 10.4.1.
5. In practice the lowest natural frequency of the system is of particular interest,
since design specifications often prescribe a minimum allowable limit for the
lowest natural frequency.
We will derive two important results
below, which give a quick way to estimate the lowest natural frequency. Consider a linear elastic solid with elastic
moduli and mass density , which occupies a volume V and has a surface S. A part of the surface may be prevented from moving (or subjected to
some time-independent displacement).
Let be the displacements associated with the
natural modes of vibration. Then
1. The mode shapes are orthogonal,
which means that the displacements associated with two different vibration
modes and have the property that
2. We will prove Rayleigh’s principle,
which can be stated as follows. Let denote any kinematically admissible
displacement field (you can think of this as a guess for the mode shape), which
must be differentiable, and must satisfy on .
Define measures of potential energy and kinetic energy associated with as
Then
The result is useful because the
fundamental frequency can be estimated by approximating the mode shape in some
convenient way, and minimizing .
Orthogonality of mode shapes
We consider a generic linear elastic solid, with elastic
constants and mass density . Note that
1. External forces do not influence the
natural frequencies of a linear elastic solid, so we can assume that the body
force acting on the interior of the solid is zero.
2. Part of the boundary may be subjected to prescribed displacements. When estimating vibration frequencies, we can
assume that the displacements are zero everywhere on
3. The remainder of the boundary can be assumed to be traction free.
By definition the mode shapes and natural frequencies have
the following properties:
1. The displacement field associated
with this vibration mode is
2. The displacement field must satisfy
the equation of motion for a linear elastic solid given in Section 5.1.2, which
can be expressed in terms of the mode shape and natural frequency as
3. The mode shapes must satisfy on to meet the displacement boundary condition,
and on to satisfy the traction free boundary
condition.
Orthogonality of the mode shapes can be seen as follows.
1. Let
and be two mode shapes, with corresponding
vibration frequencies and . Since both mode shapes satisfy the
governing equations (item 2 above), it follows that
2. Next, we show that
To see this, integrate both sides of
this expression by parts. For example,
for the left hand side,
where we have used the
divergence theorem, and noted that the integral over the surface of the solid
is zero because of the boundary conditions for and .
An exactly similar argument shows that
Recalling that shows the result.
3. Finally, orthogonality of the mode
shapes follows by subtracting the second equation in (1) from the first, and
using (2) to see that
If m and n are two distinct
modes with different natural frequencies, the mode shapes must be orthogonal.
Proof of Rayleigh’s
principle
1. Note first that any kinematically
admissible displacement field can be expressed as a linear combination of mode
shapes as
To see the formula for
the coefficients , multiply both sides of the first
equation by , integrate over the volume of the
solid, and use the orthogonality of the mode shapes.
2. Secondly, note that the mode shapes
satisfy
To see this, note first that because satisfies the equation of motion, it follows
that
Next, integrate the first term in
this integral by parts (see step (2) in the poof of orthogonality of the mode
shapes), and use the orthogonality of the mode shapes to see the result stated.
3. We may now expand the potential and
kinetic energy measures and in terms of sums of the mode shapes as follows
where we have used the result given
in step (2) and orthogonality of the mode shapes.
4. Finally, we know that for , which shows that
We see immediately that , with equality if and only if for
5.9.2 Estimate of natural frequency of vibration for a beam using
Rayleigh-Ritz method
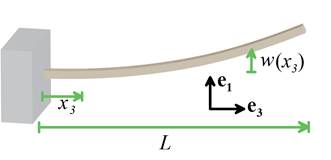
The figure below illustrates the
problem to be solved: an initially straight beam has Young’s modulus and mass density , and its cross-section has area A and moment of area . The left hand end of the beam is clamped, the
right hand end is free. We wish to estimate
the lowest natural frequency of vibration.
The deformation of a beam can be
characterized by the deflection of its neutral section. The potential energy of the beam can be
calculated from the formula derived in Section 5.6.4, while the kinetic energy measure
T can be approximated by assuming the
entire cross-section displaces with the mid-plane without rotation, which gives
The natural frequency can be estimated by selecting a
suitable approximation for the mode shape , and minimizing the ratio , as follows:
1. Note that the mode shape must satisfy
the boundary conditions .
We could try a polynomial , where C is a parameter that can be adjusted to get the best estimate for
the natural frequency.
2. Substituting this estimate into the
definitions of V and T and evaluating the integrals gives
3. To get the best estimate for the
natural frequency, we must minimize this expression with respect to C.
It is straightforward to show that the minimum value occurs for . Substituting this value back into
the results of step (2) gives
4. For comparison, the formula for exact
natural frequency of the lowest mode is derived in Section 10.4.1, and gives .
