9.5 Plastic fracture mechanics
Thus far we have avoided discussing the complicated material behavior
in the process zone near the crack tip.
This is acceptable as long as the process zone is small compared with
the specimen dimensions, and a clear zone of K dominance
is established around the crack tip. In
some structures, however, the materials are so tough and ductile that the
plastic zone near the crack tip is huge and comparable to specimen dimensions. Linear elastic fracture mechanics cannot be
used under these conditions. Instead, we
adopt a framework based on plastic
solutions to crack tip fields.
In this
section, we address three issues:
1. The size of the plastic zone at the
crack tip is estimated
2. The asymptotic fields near the crack
tip in a plastic material are calculated
3. A phenomenological framework for
predicting fracture in plastic solids is outlined.
9.5.1 Dugdale-Barenblatt cohesive
zone model of yield at a crack tip
The simplest estimate of the size of the plastic zone at a crack tip
can be obtained using Dugdale & Barenblatt’s cohesive zone model, which
gives the plastic zone size at the tip of a crack in a thin sheet (deforming
under conditions of plane stress) as
where is the crack tip stress intensity factor and Y is the material yield stress.
This estimate is derived as follows.
Consider a crack of length 2a in an elastic-perfectly plastic
material with elastic constants and yield stress Y. We assume that the specimen is a thin sheet,
with thickness much less than crack length, so that a state of plane stress is
developed in the solid. We anticipate
that there will be a region near each crack tip where the material deforms
plastically. The Mises equivalent stress
should not exceed yield in this region. It’s hard to find a solution with stresses
at yield everywhere in the plastic zone, but we can easily construct an
approximate solution where the stress along the line of the crack satisfies the
yield condition, using the ‘cohesive zone’ model illustrated in below

Let denote the length of the cohesive zone at each
crack tip. To construct an appropriate
solution we extend the crack in both directions to put fictitious crack tips at
, and
distribute tractions of magnitude over the crack flanks from to , and
similarly at the other crack tip..
Evidently, the stress then satisfies along the line of the crack just ahead of each
crack.
We can use point force solution given in the table in Section 9.3.3 to
compute the stress intensity factor at the fictitious crack tip. Omitting the
tedious details of evaluating the integral, we find that
The * on the stress intensity factor is introduced to emphasize that
this is not the true crack tip stress intensity factor (which is of course ), but the stress intensity factor at the
fictitious crack tip. The stresses must remain bounded just ahead of the
fictitious crack tip, so that must be chosen to satisfy . This gives
Its more
sensible to express this in terms of stress intensity factor
This estimate turns out to be remarkably accurate for plane stress
conditions, where more detailed calculations give
For plane
strain the plastic zone is smaller: detailed calculations show that the plastic
zone size is
9.5.2 Hutchinson-Rice-Rosengren (HRR) crack tip fields for stationary
crack in a power law hardening solid
The HRR
fields are an exact solution to the stress, strain and displacement fields near
a crack tip in a power-law strain hardening, rigid plastic material, which is
subjected to monotonically increasing stress at infinity. The model is based on the following
assumptions:
1. The solid is infinitely large,
and contains an infinitely long crack with its tip at the origin;
2. The material is a rigid plastic,
strain hardening solid with uniaxial stress -v- strain curve
where are material properties, with n>1.
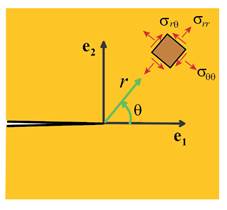 The HRR
solution shows that the stress, strain and displacement fields at a point in the solid (see the figure) can be calculated from functions of the form
The HRR
solution shows that the stress, strain and displacement fields at a point in the solid (see the figure) can be calculated from functions of the form
where are dimensionless functions of the angle and the hardening index n only, and J
is the value of the (path independent) J integral
where
with . W can
be interpreted as the total work done in loading the material up to a stress under monotonically increasing, proportional
loading.
These results are important for two reasons:
1. They show that the magnitudes of
the stress, strain and displacement near the crack tip are characterized by J.
Thus, in highly plastic materials, J
can replace K as the fracture
criterion.
2. They illustrate the nature of the
stress and strain fields near the crack tip.
In particular, they show that the stress has a singularity for n=1 (a linear stress-strain curve) we
recover the square root singularity found in elastic materials; while for a
perfectly plastic solid ( ) the stress is constant. In
contrast, the strains have a square root singularity for n=1 and an singularity for
Derivation
The HRR solution is derived by solving the following governing equations
for displacements , strains
and stresses
· Strain-displacement relation
· Stress equilibrium
· Boundary conditions on
· The stress-strain relation for a
power-law hardening rigid plastic material subjected to monotonically
increasing, proportional loading (this means that material particles are
subjected to stresses and strains whose principal axes don’t rotate during
loading) can be expressed as
where are material constants and is the deviatoric stress and is the Von Mises effective stress. Of course, we don’t know a priori that material elements ahead of a crack tip experience
proportional loading, but this can be verified after the solution has been
found. It is helpful to note that under
proportional loading, the rigid plastic material is indistinguishable from an
elastic material with strain energy potential
The J integral must then be path independent.
The equilibrium condition may be satisfied through an Airy stress
function ,
generating stresses in the usual way as
The solution
can be derived from an Airy function that has a separable form
where the
power and are to be determined.
The strength of the singularity can be determined using the J integral.
Evaluating the integral around a circular contour radius r enclosing the
crack tip we obtain
For the J integral to be path independent, it must be
independent of r and therefore W must be of order . The Airy function gives stresses of order , and the
corresponding strain energy density would have order . Consequently, for a path independent J,
we must have , so
Note for a linear material (n=1), we find , which
corresponds to the expected square-root stress singularity.
We can now scale the governing equations as discussed in Section 7.2.13. To this end, define normalized length,
displacement, strain, stress and Airy function as
With
these definitions the governing equations reduce to
· Strain-displacement relation
· Stress equilibrium
· Constitutive equation
In
addition, the stresses are related to the normalized Airy function by
while the expression for the J integral becomes
where . The only material parameter appearing in the
scaled equations is n. In addition, note that J has been eliminated from the equations, so the solution is
independent of J.
The stresses can be derived from an Airy function
The scaling of displacements, strain and stress with load and material
properties then follows directly from the definition of the normalized
quantities.
To compute the full expression for and hence to determine is a tedious and not especially
straightforward exercise. The governing
equation for is obtained from the condition that the strain
field must be compatible. This requires
Computing the stresses from the Airy function, deducing the strains
using the constitutive law and substituting the results into this equation
yields a fourth order nonlinear ODE for f, which must be solved subject
to appropriate symmetry and boundary conditions. The solution must be found numerically details are given in Hutchinson (1968) and Rice and Rosengren (1968).
9.5.3. Plastic
fracture mechanics based on J
There are many situations (e.g. in design of pressure vessels,
pipelines, etc) where the structure is purposely made from a tough, ductile
material. Usually, one cannot apply LEFM to these structures, because a large
plastic zone forms at the crack tip (the plastic zone is comparable to specimen
dimensions, and there is no K dominant zone).
Some other approach is needed to design against fracture in these
applications.
Two related approaches are used one is based on the HRR crack tip field and
uses J as a fracture criterion; the other uses the crack tip opening
displacements as a fracture criterion.
Only the J based approach will be discussed here.
The most important conclusion from the HRR crack tip field is that the
amplitude of stresses, strains and displacements near a crack tip in a
plastically deforming solid scale in a predictable way with J. Just as stress intensity
factors quantify the stress and strain magnitudes in a linear elastic solid, J can be used as a parameter to quantify the state of stress near the
tip of a crack in a plastic solid.
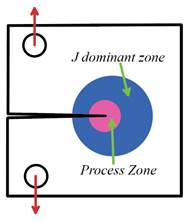 Phenomenological J based fracture mechanics is
based on the same reasoning that is used to justify K based LEFM. We postulate that we will find three distinct
regions in a plastically deforming specimen containing a crack (see the figure),
namely
Phenomenological J based fracture mechanics is
based on the same reasoning that is used to justify K based LEFM. We postulate that we will find three distinct
regions in a plastically deforming specimen containing a crack (see the figure),
namely
1. A process zone near the crack tip, with
finite deformations and extensive material damge, where the asymptotic HRR
field is not accurate
2. A J dominant zone, which is outside the
process zone, but small compared with specimen dimensions. Here, the HRR field
accurately describes the deformation
3. The remainder, where stress and strain
fields are controlled by specimen geometry and loading.
As for LEFM, we hope that the process zone is controlled by the
surrounding J dominant zone, so that crack tip loading conditions can be
characterized by J.
J based fracture mechanics is applied in much the same way as LEFM. We assume that crack growth starts when J reaches a critical value (for mode I
plane strain loading this value is denoted ). The critical value must be
measured experimentally for a given material, using standard test specimens. To assess the safety of a structure or
component containing a crack, one must calculate J and compare the
predicted value to - if the structure is safe.
Practical
application of J based fracture mechanics is somewhat more involved than
LEFM. Tests to measure are performed using standard test specimens deeply cracked 3 or 4 point bend bars are
often used. For example, calibrations
for a 3 point bend bar shown below are available in J. R. Rice, P. C. Paris and J. G.
Merkle (1973).

Calculating J
for a specimen or component usually requires a full field FEM analysis. Cataloging solutions to standard problems is
much more difficult than for LEFM, because the results depend on the
stress-strain behavior of the material.
Specifically, for a power-law solid containing a crack of length a
and subjected to stress , we expect that
For example, a slit crack of length 2a subjected to mode I
loading with stress has (approximately see He & Hutchinson (1981)
Finally, to apply the theory it is necessary to ensure that both test
specimen and component satisfy conditions necessary for J dominance. As a rough rule of thumb, if all
characteristic specimen dimensions (crack length, etc) exceed J dominance is likely to be satisfied.
