2.7 Transformation of kinematic and kinetic variables
under changes of reference frame
In this section we discuss how the vectors and tensors
we use in solid mechancis change when we change our coordinate system and the
reference configuration that is used to describe shape changes. This seems a rather abstract and obscure
topic for practical purposes. It becomes
important, when we construct
constitutive equations that relate deformation measures (usually one set of
tensors) to stresses (another set of tensors).
The constitutive equatinons must behave correctly in all possible
choices of coordinate system.
This is a difficult concept that requires a more
abstract understanding of the mathematical machinery that we use to describe
the behavior of deformable solids. We
need to start by understanding what is meant by a ‘reference frame,’ and then
work out how our vectors and tensors transform between two particular choices
of reference frame. These relations will
be used to ensure that stress-strain relations satisfy the principle of
material frame indifference.
We start by introducing the concept of the Newtonian
‘inertial frame.’ This is particular
choice of coordinate system that describes position in space, in which particle
motion and forces (defined in classical mechanics by comparing them to gravity)
are observed experimentally to obey Newton’s three laws of motion. We describe the position of each point in this
frame by a triad of real numbers r, and
choose to define the distance between any two points as the dot product .
Mathematically, this defines a Euclidean vector space. Of course the choice of three real numbers r characterizing position is not
unique, but we can generate all possible inertial frames by a length preserving
mapping of the form
Here is a new triad of
real numbers; is a constant vector (another triad of real numbers), t is time, is an arbitrary
point in space (expressed in the first choice of frame), and is a time
independent proper orthogonal tensor ( and ). It is worth pausing to interpret this
equation carefully it looks like a
deformation being applied to a solid, but it actually represents a change of coordinates we are assigning
a different set of numbers to each point in space.
To complicate things further, in classical mechanics we
also frequently make use of frames that are not inertial. You have done this when analyzing particle
motion using cylindrical polar or spherical-polar basis vectors, for example. The family of all possible non-inertial frames is generated by a
time dependent mapping
Here, and are (as before) a
vector and a proper orthoganal tensor, but they are now time dependent. Points in physical space are still
identified by a triad of real numbers , and the distance between two points is still defined
by the same dot product , but the real numbers associated with each point in the
Newtonian frame now vary with time. We
can attach a physical significance to this mathematical transformation by
noticing that this is how an observer who is rotating and translating relative
to the Newtonian inertial frame might choose to describe the world.
These mathematical transformations define what we mean
by a ‘change of frame’ or a ‘change of observer’ in classical mechanics. Any frame is a
Euclidean vector space, so we can construct any arbitrary vector in these
spaces as a linear combination of three non-parallel position vectors. We can define a vector or tensor in one
frame, and then map it to the other.
What this means in practice is that if we measure some vector quantity,
we find a way to quantify its magnitude and direction by three real numbers
(and their units!). For tensors we use 9 numbers. But this is meaningful only
if we also specify the reference frame we are using for our vector, because the
same vector will (usually, but not always) appear as a different set of numbers in the other frame. How these two sets of numbers are related
depends on how the vector is defined so as we shall see shortly the
change of frame is slightly more complicated than a simple change of coordinate
system.
For the purposes of discussing the concept of ‘material frame
indifference’ we are interested in how vector and tensor quantities transform
under a particular change of observer and reference configuration. The reason for this is discussed in more
detail in Section 3.1. Our first
observer chooses to use the inertial frame (one arbitrary choice from the
family of possible inertial frames).
Our second observer chooses to use a frame that rotates and translates
with respect to the inertial frame.
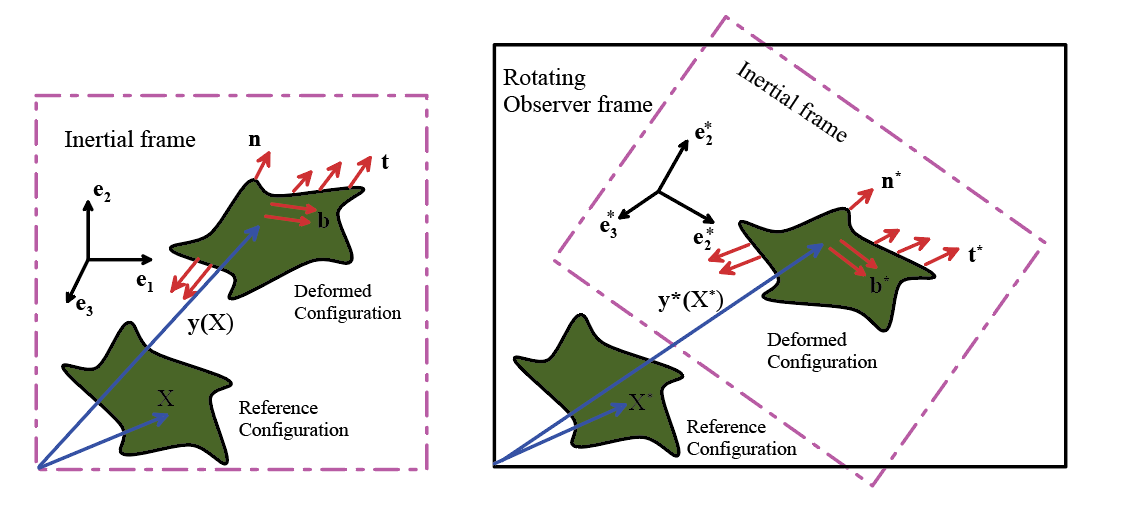
We also assume that both observers
use the same time independent coordinates in their separate frames to specify
the position of a material particle in the reference configuration for the
solid. The two reference
configurations then have the same shape (because both coordinate systems are
Euclidean vector spaces with identical definitions of ‘distance’). Both observers also see a stationary
reference configuration in their own frame. But if one observer could see the
reference configuration that is used by the other, it would appear to be
rotating and translating with respect to their frame (a rigid rotation). This transformation of observers and
reference configuration is illustrated in the figure.
This is perhaps the most difficult idea in this discussion, because we
are accustomed to using some physical shape occupied by the solid (usually its
unloaded configuration) as the reference configuration. But this is not necessary. The reference configuration is a purely
mathematical way of assigning a coordinate X
to each material particle in a solid.
Physical positions of these material particles in the inertial frame
(i.e. what we actually observe) are specified by the deformation mapping . We can describe exactly the
same motion of the solid, including its initial position and orientation, using
any Euclidean space for X switching from one to the other
will just change the mathematical functions of time and X that appear in our formulas for y. In the same way, any
equations relating stress to strain measure must predict the same behavior in
the actual inertial frame regardless of the choice of X.
With this background, we will now derive how the vectors and tensors we
use in continuum mechanics transform as a result of this simultaneous change in
coordinates and reference configuration (we refer to this as a ‘change of
reference frame’). In the discussion to
follow, we will use a bold faced symbol with no superscript to denote a vector
(3 real numbers) in the inertial frame: position of a point in space is ; the position vector of a material particle is , Cauchy stress (9 numbers with the necessary symmetry!) as , and so on. Vectors and tensors
in the rotating observer’s frame will be denoted with a starred superscript , and so on. These symbols just
represent a second set of 3 or 9 numbers.
· Scalar quantities,
such as density or temperature are always invariant
they have the
same value in both the inertial frame and in the observer’s frame.
· Vector quantities
that describe geometry or particle motion in the real world are always defined
by measurements conducted in the inertial frame. We specify the magnitude and direction of
these vectors by representing them as a suitable combination of position
vectors (a basis) in the inertial frame.
They can be regarded as connecting two fixed points in the inertial
frame, and must transform with the line connecting these two points under a
change of reference frame. For example,
a normal vector to a deformed surface, body force, velocity, acceleration
vectors must transform as
Vectors that transform in this way are said to be frame indifferent, or objective.
This is a rather unfortunate terminology because it sounds like the coordinates
themselves don’t change. It really means
the opposite the coordinates must change so
that all observers must describe in a consistent way some vector valued
quantity that is measured in the inertial frame (which in a Newtonian universe
is the only frame in which physical laws hold).
· Similarly, tensor
quantities that map a frame indifferent vector onto another frame indifferent
vector are similarly said to be frame
indifferent, or objective. Examples include the stretch rate tensor (which relates the
relative velocity of two ends of an infinitesimal material fiber in the spatial
configuration); or Cauchy stress (which maps the normal to a surface in the
spatial configuration to the physical traction vector. As we shall see with specific examples listed
below frame indifferent tensors must transform as
· The special vectors
and tensors that happen to be frame indifferent have the following
feature. Let be an inertial
basis (three linearly independent vectors in the inertial frame). In the observer’s reference frame these
vectors transform to a time-dependent triad . Now, we can compute components of a frame indifferent
vector or tensor in either basis
Thus, the
components of a frame indifferent vector or tensor in a basis that rotates with
the inertial frame are independent of the observer. This is why they are called ‘frame
indifferent.’
· Not all vectors and tensors are frame
indifferent. For example, the position
vector of material particles in the reference configuration satisfies (by
definition): . Vectors of this form are said to be invariant
they have the same coordinates in
all reference frames. This is a matter of choice. It may seem a bit odd, because we usually
use the initial configuration of a solid as the reference, which suggests that
the reference configuration has to occupy a fixed region in the inertial
frame. This is not the case,
however. The reference configuration is
a purely mathematical entity that we use to quantify changes in length and
relative orientation of lines that connect material particles in a solid. We can do this by assigning each material
particle a position in any Euclidean vector space with the same metric as the
inertial frame. We can, for example,
specify the reference configuration as follows: (i) choose the initial
configuration of the solid; (ii) measure the position X of each material particle in the inertial frame (this is a set of
real numbers); and (iii) take the reference configuration to be the region
defined by this set of real numbers in the rotating observer’s frame. This appears to rotate the reference
configuration, but of course it does not change its shape. The behavior of the solid obviously has to be
unchanged a shape preserving change of reference configuration. Of course, we would be unlikely to use the
reference configuration in the rotating observer’s frame in any actual
calculation it makes much more sense to use
the initial configuration in the inertial frame as reference, and we have
assumed that this is the case in the whole of the rest of this text. We are abandoning this assumption here
because it tells us something interesting about constitutive equations, as
discussed further in Chapter 3.
· This choice of reference
configuration means that any tensor that maps a vector from the reference frame
onto another vector in the reference frame is also invariant. So for example we can show that the Lagrange
strain tensor and the right stretch tensor satisfy
With this preamble, we now proceed to derive how various
quantities used in continuum mechanics will transform with this simultaneous
change in reference configuration and reference frame.
· The deformation
mapping that describes
motion of each material particle in the reference configuraiton in space
transforms as
(recall that )
· Take the time
derivatives to see that velocity and acceleration vectors satisfy
where
is the spin tensor associated with the rotating observer
frame. The additional terms in the acceleration involving represent the
centripetal and coriolis accelerations associated with this rotation. You will sometimes see statements in the
literature that ‘acceleration vectors are not frame indifferent.’ Actually, they are frame indifferent (according to the definition used here)
because they transform to the new frame as . What these statements are really saying is that in a
non-inertial frame . There is no
difficulty analyzing motion in the inertial frame using a second non-inertial
rotating frame, provided we use the correct formulas relating . We do this
without a second’s thought when we analyze particle motion using cylindrical
polar coordinates in our intro mechanics courses.
· The displacement of
a particle from its position in the reference configuration to its position in
the deformed solid is in the inertial
frame. This transforms to
in the rotating observer frame. But this measure of displacement is not a
very useful quantity (it is clearly not frame indifferent). It is better to
measure the displacement of a material particle from its initial position. This is
This displacement
vector evidently transforms as and is frame
indifferent.
· Differentiate the
deformation mapping and recall that to see that the
deformation gradient transforms as
· The Jacobian of the
deformation gradient is frame invariant .
· Use the definitions
to see that the right Cauchy Green strain
Lagrange strain, and the right stretch tensor are related by
· The left Cauchy
Green strain, Eulerian strain, left stretch tensor are frame indifferent
· The velocity
gradient, stretch rate, and spin tensors transform as
where we have noted that
· The infinitesimal
strain tensor becomes a rather ambiguous deformation measure with our new
choice of reference configuration. If we
use the formal definition this quantity
transforms as . But this strain
is not ‘infinitesimal’ in any sense, and may not be zero in the undeformed
solid. In any practical application of
the infinitesimal strain tensor we take the undeformed solid as reference. It is better to define the infintesimal
strain as the symmetric part of the derivative of the displacement vector with
respect to position in the undeformed solid, i.e.
This quantity
transforms as
With the new
definition it is therefore a frame indifferent tensor.
· The Cauchy stress is
frame indifferent . You can see this from the formal definition the tensor maps a
vector in the inertial frame (the normal to an internal surface) to another
vector in the inertial frame (the traction acting on the internal
surface). Or if you find that
unconvincing, you can use the fact that the virtual stress power (a scalar) must be
invariant under a frame change. This is
left as an exercise.
· The material stress
is frame invariant (can you show this?)
· The nominal stress
transforms as
(note that this transformation rule will differ if the
nominal stress is defined as the transpose of the measure used here…)
· The rate of change
of Cauchy stress transforms as
· Since the rate of
change of Cauchy stress is not an objective tensor we sometimes construct
constitutive equations using alternative measures of stress rate that are
objective. One such example is the
Jaumann stress rate
where W is the spin
tensor. This quantity transforms as
This quantity is frame indifferent.
There are many other examples of frame indifferent stress rates.
· We occasionally encounter
higher-order tensors in constitutive equations. An example is the tensor of elastic moduli
in linear elasticity, which maps the infinitesimal strain tensor onto Cauchy
stress as
This maps a frame indifferent tensor
(provided we use the frame indifferent definition of infinitesimal strain) onto
another frame indifferent tensor, and so must be a frame indifferent tensor
itself. It is easy to show that it
transforms as
Transformation laws for other high
order tensors may differ, but will follow as a consequence of their formal
definition.
By this time you are probably asking yourself why anyone could possibly
care about all this. This is a fair
question we don’t use these relations much
in practice, but they are useful when we define constitutive laws for a
material. This issue is discussed in more detail in Section 3.1
