8.8 Constraints,
Interfaces and Contact.
This section describes three
important extensions of the finite element method: enforcing general
constraints on the motion of nodes in a mesh; a technique to model fracture
along a weak interface in a solid; and methods for modeling contact between
solids.
8.8.1 Enforcing
constraints on the motion of nodes
We often need to constrain the motion
of some subset of nodes in a mesh in ways that do not resemble the standard
displacement boundary conditions that were discussed in earlier sections of
this chapter. A few examples include:
· Connecting together two incompatible
meshes
· Connecting the end of a beam (which
has rotational degrees of freedom) to a meshed 3D or 2D solid (the nodes in
this mesh only have displacement degrees of freedom)
· Enforcing periodic boundary
conditions on a representative volume element of a microstructure.
Two methods are available to enforce
this type of constraint: (i) the so-called ‘penalty method,’ which enforces the condition approximately,
by penalizing departures from the constraint using a stiff spring; and (ii)
Lagrange multipliers, which enforce the constraint exactly using reaction
forces that are calculated as part of the solution, but at the cost of
increasing the number of unknowns in the finite element equations, and (for
dynamic problems) making explicit time integration of the equation of motion
more difficult. Both approaches will be
summarized briefly in this section.
Enforcing constraints with a penalty:
Suppose that we
wish to run a finite element simulation that models quasi-static deformation of
a solid, but need to constrain the motion of some subset of M nodes in the mesh to move together in
some way. The relevant constraint
equation(s) could be written in the general form
where a is the index of the M
nodes; and k is an index identifying
one of the constraint equations. The
‘penalty’ method enforces the constraints approximately, by applying a large
force to each constrained node that acts to oppose any deviation from the
required motion. The restoring force on
the ath node is usually defined to be
where is a large constant that resembles a spring
stiffness. In some applications it may
be necessary to assign different values of G
to each constraint so that the forces from the various constraints have similar
magnitudes, but we will not pursue this here.
We can account for the constraint by
modifying the principle of virtual work to include the rate of work done by the
restoring forces in the virtual work equation.
For example, the finite element equations for a small strain problem (eg
the hypoelasticity problem solved in Section 8.8.3) now have the form
The additional term can be added to
any of the finite element equations listed in this chapter. In each case the result is a system of linear
(if the solid is linear elastic and the constraint happens to be linear) or
nonlinear (more common) equations that can be solved for the unknown nodal
displacements.
As usual, the solution (for a general nonlinear system) is
found using Newton-Raphson iteration, which means repeatedly solving a set of
linear equations
for corrections to the current approximation for the displacement field, where the
stiffness and internal force vector now include contributions from the
constraints
To implement this in a code, we can simply
regard each constraint as just another element in the mesh, which connects the
nodes that appear in the constraint equation.
The element has its own stiffness matrix and force vector, which can be
added to the global system of equations using the usual procedure.
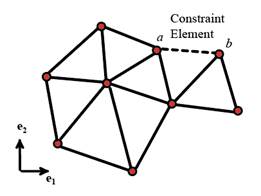
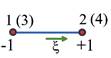
As a simple example, suppose that we
wish to constrain two nodes a and b in a mesh to have the same
displacement. In this case the element
connects nodes a and b, as shown in the figure. The constraint equation is simply
For a two-dimensional mesh, we could
choose to order the element degrees of freedom as , in which case the stiffness and
force are simply
The penalty method is simple to
implement, can be added to any standard FEA equations, and can be used in both
static and dynamic analyses. It has two
drawbacks: (i) the constraint is not satisfied exactly, and (ii) the penalty
coefficient G has to be chosen
carefully: if G is too small, the
constraint will not be satisfied, and if it is too large, it will make the
stiffness matrix poorly conditioned, or make the stable time step in an
explicit dynamic simulation very small. G is usually chosen by trial and error:
start with some rough guess, then check and see if the constraint is violated
too severely. If so, G must be increased (try increasing it
by a factor of 10). If the constraint is
satisfied it may be possible to reduce G. A more sophisticated approach is to estimate
the magnitude of the stiffness matrix before the constraint is applied (e.g.
find the average value of its diagonal), and then choose G to be some multiple (eg. 104) of the stiffness
measure.
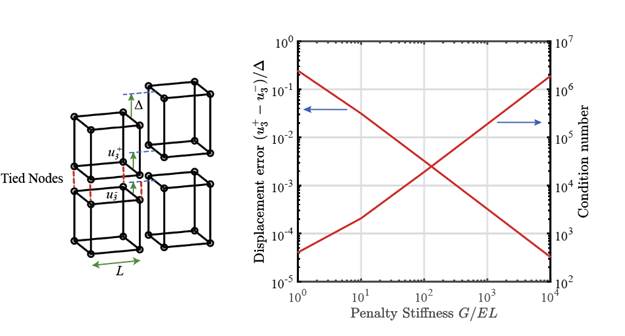
A simple illustration of a penalty
element in action is shown in the figure.
The mesh consists of two separate hexahedral elements, as shown on the
left. Penalty elements are used to
constrain the degrees of freedom on the four lower nodes of the top element to
be equal to those on the four nodes on the top face of the bottom element. The base of the lower element is prevented
from moving vertically, while a prescribed vertical displacement is applied to the top face of the upper element. The graph plots the variation of the error
in the constraint and the condition number of the global stiffness matrix as a
function of the normalized penalty stiffness.
For low values of the matrix has a low condition number but the
constraint is not enforced accurately; as increases the error diminishes, at the cost of
an increase in the condition number.
A code that runs the test in this example is provided in the
file FEM_Penaltyconstraint.m (along with input file Tie_constraint_example.txt)
at
https://github.com/albower/Applied_Mechanics_of_Solids/
Enforcing constraints with a Lagrange Multiplier in static or implicit
dynamic computations:
There is a second, more sophisticated, way to enforce constraints. The basic idea is simple: in the previous
section the constraint was satisfied approximately by applying forces to the
constrained nodes in the mesh. The forces were proportional to the deviation
from the constraint, analogous to a linear spring. Lagrange multipliers are reaction forces that
enforce the constraint exactly.
As before, we start by re-arranging the constraint equations
into the form
where a is the index of the M
nodes; and k is an index identifying
one of the constraint equations. Each
constraint is assigned an unknown reaction force (the Lagrange multiplier) , which must be determined along with
the unknown displacements. In
addition, the work done by the reaction force must be added to the virtual work
equation, which (using the VWE for a hypoelastic solid as a representative
example) now takes the form
The unknown Lagrange multipliers are
found by including the constraint equations in the global system.
The virtual work equation and the
constraint equations are solved concurrently for the unknown displacements and
Lagrange multipliers using Newton-Raphson iteration. Since we need to solve for both displacements
and Lagrange multipliers, the iteration proceeds by repeatedly solving a set of
linear equations
for corrections to the current approximation for the displacement field and corrections to the Lagrange multipliers. The additional
contributions to the equation system from the constraints are shown explicitly,
and as usual
The extra terms from the constraints
look scary, but it turns out that Lagrange multipliers can be added very easily
to a standard static FEA code. We
simply create a new element for each constraint. The element connects all the nodes in the
constraint, and has one extra node, which has the Lagrange multiplier as an
unknown degree of freedom. The
stiffness matrix and force vector for the constraint element are
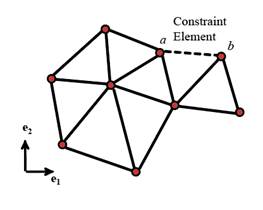
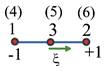
As a simple example, suppose that we
wish to constrain two nodes a and b in a two-dimensional mesh to have the
same displacement in the direction.
In this case the element connects nodes a and b, as shown in the
figure. The constraint equation is
simply
For a 2D mesh, we could choose to
order the element degrees of freedom as , in which case the stiffness and
force are
It may seem odd to include both
components of displacement for the nodes in the vector of element degrees of
freedom: this is not essential, but makes it easier to add the contribution
from the Lagrange multiplier element to the global equation system. If (as in the preceding section) we wish to
force nodes a and b to have the same displacement in all
directions, we simply create a separate Lagrange multiplier element for each
displacement component.
A final observation is helpful if you
are thinking of using Lagrange multipliers in your code. Some old equation
solvers which solve the finite element linear system of equations by Gaussian
elimination without pivoting may have difficulties handling the zero diagonal
that appears in the stiffness for the Lagrange multiplier degrees of freedom. Fortunately,
this is rarely a problem with modern sparse equation solvers.
A code that implements Lagrange multipliers is provided in
the file FEM_LagrangeMultiplierconstraint.m (along with input file
Tie_constraint_example.txt) at
https://github.com/albower/Applied_Mechanics_of_Solids/
Enforcing constraints with a Lagrange Multiplier in explicit dynamic
computations.
Explicit dynamic computations were described in Section 8.2.4 (for the special
case of a linear elastic solid). More
generally, they are an efficient way to solve equations of motion of the form
where (for small strains, but nonlinear material behavior)
are the internal and external force
vectors, and is the diagonal ‘lumped’ mass matrix for a
finite element mesh. Without
constraints, this equation is usually solved using the explicit dynamic version
of the more general ‘Newmark’ time integration scheme described in Section
8.2.4. This works as follows: we are
given the initial nodal velocities and displacements .
The time-stepping starts by computing (at time t=0) the initial acceleration
,
Then, for successive time steps
1. Calculate the displacements at time as
2. Calculate the accelerations at time
Recall that M is diagonal, so the equation solving is trivial: this is the main
advantage of explicit dynamics.
3. Update the velocity as
We now wish to solve a modified
problem in which some subset of nodes is constrained by equations of the form
(the initial displacements must
satisfy the constraints). It is not
possible to enforce this type of constraint using Lagrange multipliers in the
standard explicit dynamic Newmark algorithm, because the Lagrange multipliers
have no mass. Instead, a two-step
‘predictor-corrector’ method is used for
this purpose, as follows. The procedure
begins by calculating the initial accelerations using the usual expressions. Then, for successive time steps:
1. Predictor step: Compute predictors for the accelerations, velocity and displacement (without enforcing constraints) using the
standard Newmark procedure:
2. Corrector step:
Calculate the correct accelerations for each constrained node, along with the
Lagrange multiplier for the constraint, by solving the following system of
linear equations
and then, update the velocity and
displacement for the constrained nodes using the standard Newmark algorithm
with the corrected accelerations
For example, to constrain two nodes a and b in a
two-dimensional mesh to have the same displacement in the direction.
The constraint equation is then
The equation system for the corrector step is then

where are the lumped masses of nodes a and b. Notice that if all constraints are ties between two degrees of
freedom, they may be treated independently.
This requires only a solution of a 3x3 linear system for each tie at
each time-step, which can be done quickly.
The predictor-corrector algorithm can
be derived as follows. The constrained
equation system (with the correct accelerations) has the form
The predictor accelerations neglect the constraints, and
therefore satisfy
Subtracting this from the constrained equation system yields
We satisfy this equation at the end
of the time-step, using the standard Newmark approximation for the displacement
Substituting this expression for the
displacements and expanding the constraint equation for small then yields
This can be rearranged into the equation system for the
corrector step.
In practice, explicit dynamic
simulations tend to enforce constraints with the penalty method rather than
Lagrange multipliers, because solving for the Lagrange multipliers can slow
down the explicit dynamic Newmark algorithm.
The two exceptions are simple tie constraints, which can be enforced
without solving large systems of equations, and handling ‘hard’ contact between
two solids, where it is preferable to enforce the constraints between
contacting nodes and elements exactly.
A code that implements this algorithm is provided in the file
FEM_dynamic_constraints.m (along with input file dynamic_constrained_beam.txt)
at
https://github.com/albower/Applied_Mechanics_of_Solids/
The code animates a vibrating beam,
which has a single element connected to its end by Lagrange multiplier constraints.
8.8.2 Modeling
interface fracture: Cohesive zone elements
Cohesive zones are used to model the
nucleation and propagation of cracks along weak interfaces in a solid, as well
as to model adhesion between two contacting surfaces. They are described in detail in Section
3.13.1. Here, we describe how a
cohesive zone can be added to a finite element simulation. To keep things
simple, we describe a small displacement cohesive zone element.
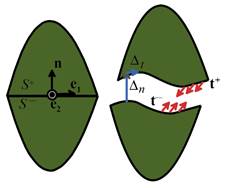 Example traction-separation law for cohesive interfaces: The figure shows a representative
interface between two solids before and after it separates. The displacement and forces acting on the
two surfaces adjacent to the interface are quantified as follows:
Example traction-separation law for cohesive interfaces: The figure shows a representative
interface between two solids before and after it separates. The displacement and forces acting on the
two surfaces adjacent to the interface are quantified as follows:
1. Introduce a basis with in the plane of the interface and normal to it.
The vector n can point in
either direction perpendicular to the interface, but once chosen, we designate
the surface with normal n as and that with normal -n as .
2. The relative displacement of two
points on that are coincident in the undeformed solid , and has components in .
The tangential component of displacement is
3. The tractions on the two adjacent
surfaces are quantified by the traction components acting on .
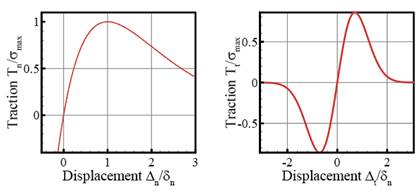
Constitutive equations for a cohesive
interface relate and .
To keep things simple, in this section we implement a finite element
solution for a widely used cohesive zone law originally developed by Xu and
Needleman (1995). The tractions are
related to the displacements by:
where are material properties. The parameter is the strength of the interface in tension; is the normal separation corresponding to the
maximum stress; and is a small viscosity. In the quasi-static limit the work of
separation per unit area for the interface is per unit area.
The viscous term is sometimes omitted, but helps to ensure that sudden
nucleation of a crack in the interface does not cause convergence problems
during the Newton-Raphson solution of the equilibrium equations. Usually, simulations are run with as small a
viscosity as possible. The variation
of normal and tangential traction with normal and tangential relative
displacement of the two solids adjacent to the interface is shown in the figure
below.
Finite element equations: We account for the cohesive interface
in a finite element simulation by adding the work done by the tractions acting
on the two sides of the interface to the virtual work equation. For example, the discrete virtual work
equation for a hypoelastic solid becomes
where are the components of , , denote the interpolation functions for the
element faces connecting the nodes adjacent to
and , and denotes the surface (or line) defining the
interface. The additional term can be
added to any of the virtual work equations covered in Chapter 8. Even if the solid is a linear elastic
material, the virtual work equation is nonlinear, because the
traction-separation law for the interface is nonlinear. In addition, the traction-separation law is
rate dependent, so the load must be applied in a series of time increments , and at each step the increment of
displacement must be found by Newton-Raphson
iteration. This means repeatedly solving
a set of linear equations
for corrections to the current approximation for the displacement increment, where the
stiffness and internal force vector now include contributions from the interfaces
The additional contributions to and from the interface can be added by meshing the
interface with planar ‘cohesive zone’ elements. To begin, the solids adjacent to the element
are meshed in the usual way with standard continuum elements, but the meshes
are designed so that (i) the same element geometry and interpolation scheme is
used in both solids, and (ii) the two solids have coincident nodes on the
interface. The interface can then be meshed with planar
triangular or quadrilateral elements (in 3D) or linear or quadratic line
elements (in 2D). The order of
interpolation should be consistent with the solid elements adjacent to the
interface. Representative interface
elements (with the nodes attached to the two solids shown separated for
clarity) are shown in the figure below.
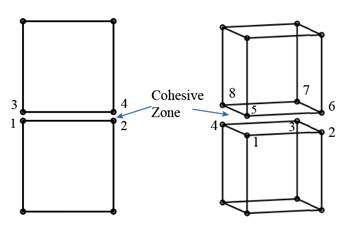
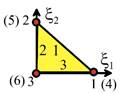
The displacement field is then
interpolated within each element using the shape functions listed in the tables
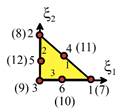
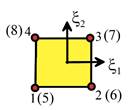
below, as follows. The nodes on the interface element are
numbered so that those on have the lowest node numbers. For example, for a linear line element, nodes
1 and 2 lie on , while nodes 3 and 4 are the nodes
on that are coincident with nodes 1 and 2, respectively. For a linear quadrilateral element, nodes 1-4
lie on , and nodes 5-8 lie on , with node 5 coincident with node 1
in the undeformed solid, and so on.
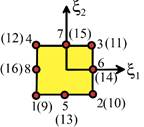
|
Interpolation functions for 2D cohesive zones
(numbers in parentheses show coincident nodes)
|
|
|
|
|
|
|
|
Interpolation functions for 3D cohesive zones
(numbers in parentheses show coincident nodes)
|
|
|
|
|
|
|
|
|
|
|
|
|
Taking an 8 noded linear cohesive
zone element between two 8 noded hexahedral elements as a representative
example, we then perform the following calculations for each integration point
in the element:
1. Assemble the vector of nodal
coordinates and the 2D matrix of shape function
derivatives
where with a=1…4
are the interpolation functions for the 4 noded quadrilateral elements listed
in Table 8.3 and hence calculate
2. Assemble a matrix B that maps displacement components in
the directions to the normal and tangential
displacement jump at an arbitrary point in the element by defining (for a 3D
element)
For a linear 8 noded quadrilateral
cohesive zone element the B matrix
is

where are the components of .
Similar matrices can be constructed for other elements using the
definition.
3. Calculate the displacement jumps , determine the time derivative of
the displacement jumps by dividing the increment in displacement by the time
increment, and hence use the traction-separation law to assemble the traction
vector .
4. Assemble a tangent matrix D that quantifies the stiffness of the
interface. For a 3D interface
The derivatives in this matrix are
The element
stiffness and internal force vector for the cohesive zone element can then be
calculated as
where are the integration points and weights for a
2x2 point Gaussian quadrature scheme (see Section 8.1.12).
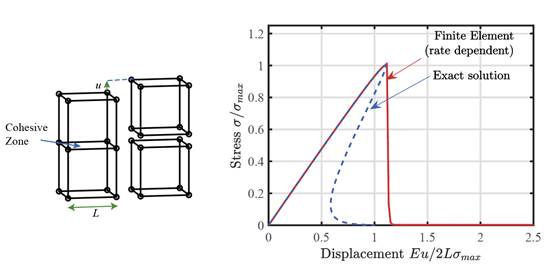
Example: A simple example of the use of a
cohesive zone element to predict interface separation is shown in the figure.
Two solid cubes with side length L
(meshed with a single element) are bonded by a cohesive interface. Both cubes have the same Young’s modulus E.
The interface has strength , separation at peak stress; and viscosity .
The bottom cube is prevented from displacing vertically, and the top
face of the upper cube is displaced vertically by distance u(t) at constant rate .
The cubes are in a state of uniaxial vertical stress with magnitude .
The graph shows the stress in the cubes as a function of the imposed
displacement. For comparison, the exact
solution for a rate independent interface can be expressed in parametric form
as
The result is plotted as a dashed curve in the figure. Results are shown for and .
The interface experiences a ‘snap back’ instability, in which the
stress-displacement relation for the rate-independent interface has a portion
with negative slope. Since a
monotonically increasing displacement is prescribed on the upper solid in the
finite element simulation, the interface experiences a rapid separation (at a
rate determined by the viscosity of the interface) and the stress drops rapidly
from a value close to its peak to close to zero. If the simulation is attempted with , the Newton-Raphson equilibrium iterations
fail to converge at the point where the instability occurs, and the simulation
terminates.
A code that runs the test in this example is provided in the
file FEM_Cohesive_Zones.m (along with input files CohesiveZone_example.txt and
CohesiveZone_Example_2D) at
https://github.com/albower/Applied_Mechanics_of_Solids/
8.8.3 Modeling Contact
We end this chapter with a brief description how contact between two
deformable solids can be treated in a finite element simulation. To keep things simple we consider only
two-dimensional, static, ‘hard’ frictionless contact, but we will account for
large changes in the geometry of the contacting solids.
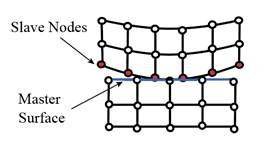 Contact geometry: The figure shows the problem to be
solved. We anticipate that two finite
element meshes may come into contact during an analysis (or the mesh may
contact itself). Wherever contact does
occur, we must prevent the meshes from overlapping. We therefore need a way to calculate the gap
between the two surfaces.
Contact geometry: The figure shows the problem to be
solved. We anticipate that two finite
element meshes may come into contact during an analysis (or the mesh may
contact itself). Wherever contact does
occur, we must prevent the meshes from overlapping. We therefore need a way to calculate the gap
between the two surfaces.
To do this, we designate one of the contacting surfaces as the ‘master,’
and the other as ‘slave.’ The choice is
arbitrary, but it can be helpful to select the stiffer of the two surfaces as
the ‘master.’ We then fit a curve
through the nodes on the master surface in some way: this curve is used to
define the boundary of the solid. Here,
we will connect the nodes with straight-line segments, but quadratic or higher
order polynomials are often used as well.
The contact algorithm must prevent the nodes on the ‘slave’ surface from
penetrating within the ‘master’ curve.
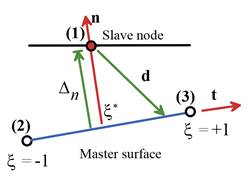 A representative slave node (given
the number 1) and master segment (connecting nodes 2 and 3) is shown in the
figure. The nodes have positions (after deformation) , a=1..3.
For subsequent calculations it is helpful to define a set of
interpolation functions that will be used to calculate the gap between the node
1 and the master segment:
A representative slave node (given
the number 1) and master segment (connecting nodes 2 and 3) is shown in the
figure. The nodes have positions (after deformation) , a=1..3.
For subsequent calculations it is helpful to define a set of
interpolation functions that will be used to calculate the gap between the node
1 and the master segment:
It is helpful
to note that
1. a vector from the slave node to a
point at normalized coordinate on the master segment can be calculated as .
2. A unit vector tangent to the master
surface can be calculated as
3. A unit vector normal to the master
surface follows as
In addition, the calculations
described here can be extended to a curved geometry for the master segment by
including more master nodes, and interpolating between their positions using
higher order polynomials for .
The gap between the slave node and the master segment is then
calculated as follows:
1. Determine the point on the master segment that is closest to the
slave node from the condition .
For a straight line master segment this is a linear equation with
solution
For higher order master segments the
equation is nonlinear and must be solved numerically.
2. Calculate the gap from .
The finite element solution must then
satisfy: (i) for all slave nodes and (ii) The reaction
force between master surface and slave node must be repulsive or zero. In a static analysis, these conditions are
satisfied by iteration, as follows:
1.
Start
with some guess for the nodes that are in contact;
2.
Solve
the equilibrium equation while enforcing the condition for these nodes
3.
Calculate
for slave nodes that were not included in the
contact set, and add any with to the contact set for the next iteration
4.
Calculate
the reaction force for slave nodes in the contact set and remove any with
tensile reactions from the contact set for the next iteration
5.
Check
that for all slave nodes. If not, a slave node has slid from one
master segment to its neighbor. Update
the connectivity for the master-slave elements for the next iteration.
6.
If
there was a change in the list of contacting nodes or the master-slave
connectivity, return to step 2.
Constrained virtual work equation: The constraints at slave nodes are
satisfied using Lagrange multipliers, as described in Section 8.8.1. Using the
hypoelastic solid as a representative example again, the modified virtual work
equation takes the form
where a summation on slave nodes c is implied, and
As usual the discrete virtual work
equation is a set of nonlinear equations for the unknown displacements at the nodes.
The additional unknown Lagrange multipliers are found by including the
constraint equations at the contacting slave nodes in the global
system. The equations must be solved
using Newton-Raphson iterations, which means repeatedly solving a set of linear
equations
for corrections to the current approximation for the displacement field and corrections to the Lagrange multipliers. As usual
while
with
For a
straight-line master segment p=0.
The
derivatives of in these expressions are derived as follows:
1. Recall that .
2. Perturbing this expression shows that
3. The second term on both the left and
right hand sides of this expression must be parallel to the tangent vector t. If
we dot both sides with n, therefore,
. This shows that
as required.
4. As an expedient approximation we can
also assume in step (2), so taking the dot product of both
sides with t shows that
We therefore see that
5. Since it follows that .
Recalling that , we see that
so that
6. Noting that is parallel to t and using the
result of (4) then shows that
Finally,
differentiating (3) and using (4) and (6) gives the required second derivative
of
As usual the virtual work equation looks confusing in index notation, but
the expressions for the stiffness matrix and residual force vector look simpler
when expressed in matrix form. We
create a single contact element for each slave node, which also is attached to
two (for a linear master segment) nodes on the master surface, as well as a
Lagrange multiplier node with a single degree of freedom. The residual force vector and stiffness for
this element are assembled into the global system of equations in the usual
way. The degrees of freedom for the contact element can be ordered as , in which case the element residual
force vector and stiffness matrix have the form:
where denotes an outer product, and
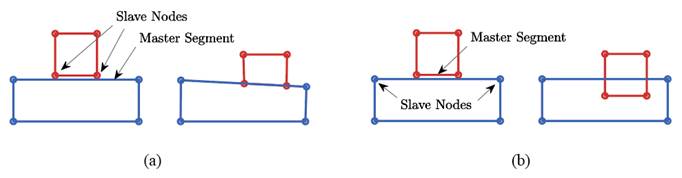
Example: The figures above show simple examples
of master-slave contact between two elements (both are linear 4 noded small
strain elements with a hypoelastic material model). The base of the larger, bottom element is
prevented from displacing vertically, and the leftmost node on the base is
fixed. A prescribed vertical displacement is applied to the two nodes at the
top of the upper, smaller element, and a horizontal displacement is imposed on
its leftmost upper node. Fig. (a) shows
that when upper surface of the larger element is selected as master surface,
the contact element correctly enforces the zero penetration boundary condition
at the contact between the two (deformed) elements, while allowing the two to
slide parallel to the contact. Fig. (b) shows
that switching master and slave element can sometimes affect the behavior of
contact elements. When the base of the
smaller element is selected as the master surface, as in Fig (b), the slave
nodes on the larger base element do not contact the master surface, and the overlap
between the two elements is not detected.
This is a somewhat extreme example, but in general good mesh design will
improve both the accuracy and convergence of a finite element simulation of
contact between two or more solids.
A code that runs the test in this example is provided in the
file FEM_Contact.m (along with input file Contact_example.txt) on the github
site at
https://github.com/albower/Applied_Mechanics_of_Solids/