8.6 Advanced element
formulations Incompatible modes; reduced
integration; B-bar and hybrid elements
Techniques for interpolating the
displacement field within 2D and 3D finite elements were discussed in Section
8.1.9 and 8.1.10. In addition, methods
for evaluating the volume or area integrals in the principle of virtual work
were discussed in Section 8.1.11. These
procedures work well for most applications, but there are situations where the
simple element formulations can give very inaccurate results. In this section
1. We illustrate some of the unexpected difficulties
that can arise in apparently perfectly well designed finite element solutions
to boundary value problems;
2. We describe a few more sophisticated
elements that have been developed to solve these problems.
We focus in particular on `Locking’
phenomena. Finite elements are said to
`lock’ if they exhibit an unphysically stiff response to deformation. Locking can occur for many different reasons.
The most common causes are (i) the governing equations you are trying to solve
are poorly conditioned, which leads to an ill conditioned system of finite
element equations; (ii) the element interpolation functions are unable to
approximate accurately the strain distribution in the solid, so the solution
converges very slowly as the mesh size is reduced; (iii) in certain element
formulations (especially beam, plate and shell elements) displacements and
their derivatives are interpolated separately. Locking can occur in these
elements if the interpolation functions for displacements and their derivatives
are not consistent.
8.6.1 Shear locking and incompatible
mode elements
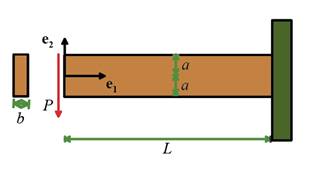 Shear locking can be illustrated by
attempting to find a finite element solution to the simple boundary value
problem illustrated in the figure. Consider a cantilever beam, with length L, height 2a and out-of-plane thickness b,
as shown in the figure. The top and
bottom of the beam are traction free, the left hand end is
subjected to a resultant force P, and
the right hand end is clamped. Assume
that b<<a, so that a state of
plane stress is developed in the beam.
The analytical solution to this problem is given in Section 5.2.4.
Shear locking can be illustrated by
attempting to find a finite element solution to the simple boundary value
problem illustrated in the figure. Consider a cantilever beam, with length L, height 2a and out-of-plane thickness b,
as shown in the figure. The top and
bottom of the beam are traction free, the left hand end is
subjected to a resultant force P, and
the right hand end is clamped. Assume
that b<<a, so that a state of
plane stress is developed in the beam.
The analytical solution to this problem is given in Section 5.2.4.
The figure below compares this result
to a finite element solution, obtained with standard 4 noded linear
quadrilateral plane stress elements.
Results are shown for two different ratios of .
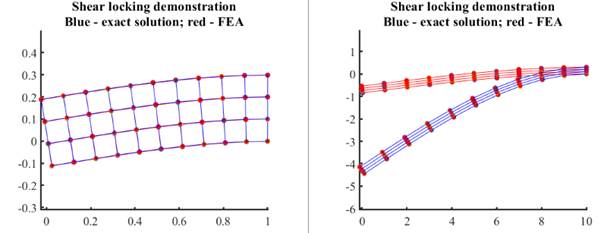
For a short, (or thick) beam, the
finite element and exact solutions agree nearly perfectly. For the long (or thin) beam, however, the
finite element solution is very poor even though the mesh resolution is unchanged. The
error in the finite element solution occurs because the standard 4 noded
quadrilateral elements cannot accurately approximate the strain distribution
associated with bending. The phenomenon
is known as ‘shear locking,’ because the element interpolation functions give
rise to large, unphysical shear strains in bent elements, which makes them
stiffer than they should be. The
solution would eventually converge if a large number of elements were added
along the length of the beam. The elements would have to be roughly square,
which would require about 133 elements along the length of the beam, giving a
total mesh size of about 500 elements.
Shear locking is therefore relatively
benign, since it can be detected by refining the mesh, and can be avoided by
using a sufficiently fine mesh. However,
finite element analysts sometimes cannot resist the temptation to reduce
computational cost by using elongated elements, which can introduce errors.
Shear locking can also be avoided by
using more sophisticated element interpolation functions that can accurately
approximate bending. `Incompatible Mode’ elements do this by adding an
additional strain distribution to the element.
The elements are called `incompatible’ because the strain is not
required to be compatible with the displacement interpolation functions. The
approach is conceptually straightforward:
1. The displacement fields in the
element are interpolated using the standard scheme, by setting
where are the shape functions listed in Sections
8.1.9 or 8.1.10, are a set of local coordinates in the element,
denote the displacement values and coordinates
of the nodes on the element, and is the number of nodes on the element.
2. The Jacobian matrix for the
interpolation functions, its determinant, and its inverse are defined in the
usual way
3. The usual expression for displacement
gradient in the element is replaced by
where p=2 for a 2D problem and p=3
for a 3D problem, are a set of unknown displacement gradients in
the element, which must be determined as part of the solution.
4. Similarly, the virtual displacement
gradient is written as
where is a variation in the internal displacement
gradient field for the element.
5. These expressions are then
substituted into the virtual work equation, which must now be satisfied for all
possible values of virtual nodal displacements and virtual displacement gradients .
At first sight this procedure appears to greatly increase the size of
the global stiffness matrix, because a set of unknown displacement gradient
components must be calculated for each element.
However, the unknown are local to each element, and can be
eliminated while computing the element stiffness matrix.
As always actual
computations are best accomplished by re-writing the calculations as matrix
operations. We will illustrate the
procedure using 2D (plane stress or strain) elements as an example; the
modification to 3D is straightforward.
The calculation follows the steps in Section 8.1.13, but the matrix B is replaced by one that maps
displacements and the additional element degrees of freedom onto the strain
vector, as , where
The standard procedure is then used to calculate an
intermediate stiffness matrix that includes additional rows and columns arising
from the incompatible modes
These matrices relate the degrees of freedom on the element
by
where is a (2nx2n) matrix, with n the number of nodes on the element and is a 4x4 matrix. We can use the last four rows to eliminate , with the result
The usual 2nx2n element stiffness matrix (which only
has displacements as degrees of freedom) and residual force are therefore
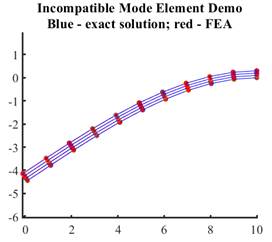
A sample small-strain, linear elastic code with incompatible
mode elements Femlinelast_incompatible_modes.m can be downloaded from https://github.com/albower/Applied_Mechanics_of_Solids .
When run with the input file
shear_locking_demo.txt, the codes produce the results shown in the figure
below. The incompatible modes clearly
give a spectacular improvement in the performance of the element.
|
|
 |
HEALTH WARNINGS: (i) The procedure outlined here only works for small-strain
problems. Finite strain versions exist
but are somewhat more complicated.
(ii) Adding strain variables to
elements can dramatically improve their performance, but this procedure must be
used with great care to ensure that the strain and displacement degrees of
freedom are independent variables. For further details see Simo, J. C., and M. S. Rifai, Int J. Num. Meth in
Eng. 29, pp. 15951638, 1990. Simo, J. C., and F. Armero, Int J. Num. Meth in
Eng., 33, pp. 14131449, 1992.
8.6.2 Volumetric locking and reduced integration
elements
 Volumetric locking can be illustrated
using a simple boundary value problem. Consider a long hollow cylinder with
internal radius a and external radius
b as shown in the figure. The
solid is made from a linear elastic material with Young’s modulus and Poisson’s ratio .
The cylinder is loaded by an internal pressure and deforms in plane strain. The analytical solution to this problem is
given in Section 4.1.9.
Volumetric locking can be illustrated
using a simple boundary value problem. Consider a long hollow cylinder with
internal radius a and external radius
b as shown in the figure. The
solid is made from a linear elastic material with Young’s modulus and Poisson’s ratio .
The cylinder is loaded by an internal pressure and deforms in plane strain. The analytical solution to this problem is
given in Section 4.1.9.
The figure below compares the
analytical solution to a finite element solution with standard 4 noded plane
strain quadrilateral elements. Results
are shown for two values of Poisson’s ratio . The dashed lines show the analytical solution,
while the solid line shows the FEA solution.
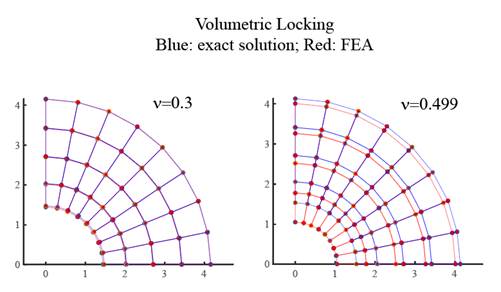
The two solutions agree well for , but the finite element solution
grossly underestimates the displacements as Poisson’s ratio is increased
towards 0.5 (recall that the material is incompressible in the limit ). In this limit, the finite
element displacements tend to zero this is known as `volumetric locking’
The error in the finite element
solution occurs because the finite element interpolation functions are unable
to properly approximate a volume preserving strain field. In the incompressible
limit, a nonzero volumetric strain at any of the integration points gives rise
to a very large contribution to the virtual power. The interpolation functions can make the
volumetric strain vanish at some, but not all, the integration points in the
element.
Volumetric locking is a much more
serious problem than shear locking, because it cannot be avoided by refining
the mesh. In addition, all the standard
fully integrated finite elements will lock in the incompressible limit; and
some elements show very poor performance even for Poisson’s ratios as small as . Fortunately, most materials have Poisson’s
ratios around 0.3 or less, so the standard elements can be used for most linear
elasticity and small-strain plasticity problems. To model rubbers, or to solve problems
involving large plastic strains, the elements must be redesigned to avoid
locking.
Reduced Integration is the simplest way to avoid locking.
The basic idea is simple: since the fully integrated elements cannot
make the strain field volume preserving at all the integration points, it is
tempting to reduce the number of integration points so that the constraint can
be met. `Reduced integration’ usually
means that the element stiffness is integrated using an integration scheme that
is one order less accurate than the standard scheme. The
number of reduced integration points for various element types is listed in Table
8.11. The coordinates of the integration
points are listed in the tables in Section 8.1.12.
HEALTH WARNING: Notice that the integration order
cannot be reduced for the linear triangular and tetrahedral elements these elements should not be used to model
near incompressible materials, although in desperation you can a few such
elements in regions where the solid cannot be meshed using quadrilaterals.
Remarkably, reduced integration
completely resolves locking in some elements (the quadratic quadrilateral and
brick), and even improves the accuracy of the element. As an example, the leftmost figure below shows the solution to the pressurized
cylinder problem, using reduced integration (with 4 integration points) for 8
noded quadrilaterals. With reduced
integration, the analytical and finite element results are indistinguishable.
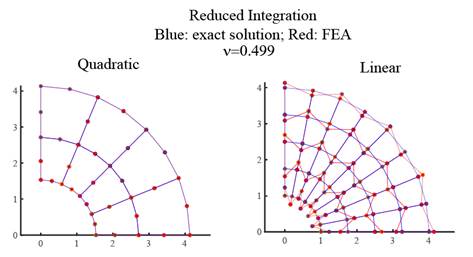
Reduced integration does not work in 4
noded quadrilateral elements or 8 noded brick elements. For example, the right hand figure above shows the solution to the pressure vessel
problem with linear (4 noded) quadrilateral elements with reduced integration
(1 integration point). The displacements
have been scaled down to show the hourglassing plotted to true scale the displacements just
look like complete garbage. The solution
is clearly a disaster. The error occurs
because the stiffness matrix is nearly singular the system of equations includes a weakly
constrained deformation mode. This
phenomenon is known as ‘hourglassing’ because of the characteristic
shape of the spurious deformation mode.
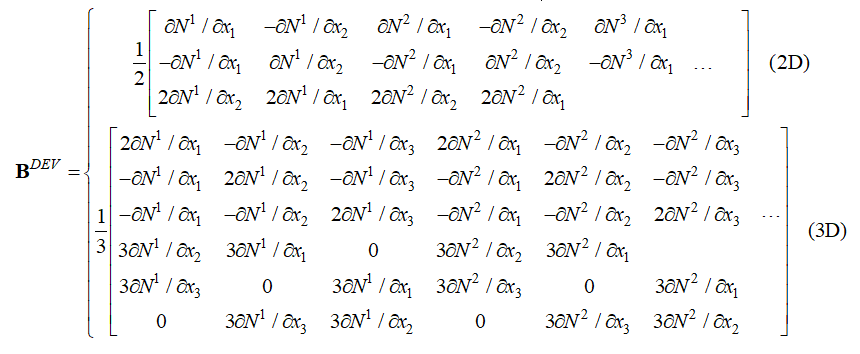
Selectively Reduced Integration can be used to cure hourglassing. The
procedure is illustrated most clearly by modifying the formulation for static
linear elasticity. To implement the method:
1. The volume integral in the virtual
work principle is separated into a deviatoric and volumetric part by writing
Here, the first integral on the right hand
side vanishes for a hydrostatic stress.
2. Substituting the linear elastic
constitutive equation and the finite element interpolation functions into the
virtual work principle, we find that the element stiffness matrix can be
reduced to
3. When selectively reduced integration
is used, the first volume integral is evaluated using the full integration
scheme; the second integral is evaluated using reduced integration points. The matrix form of the formula for the
stiffness can be written as
where denote the numbers of full and reduced
integration points, respectively, and the matrices of elastic constants (for an
isotropic material in 3D) are
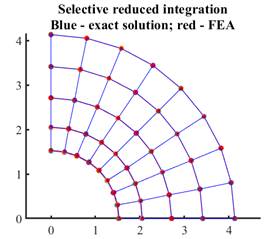
Selective reduced integration has been implemented in the
sample Matlab code Fem_selective_reduced_integration.m. The code can be
downloaded from
https://github.com/albower/Applied_Mechanics_of_Solids .
When this code is run with the input
file volumetric_locking_demo.txt it produces the results shown in the figure
below. The analytical and finite element solutions
agree, and there are no signs of hourglassing.
Reduced integration with hourglass control: Hourglassing in 4 noded quadrilateral
and 8 noded brick elements can also be cured by adding an artificial stiffness
to the element that acts to constrain the hourglass mode. The stiffness must be carefully chosen so as
to influence only the hourglass
mode. Only the final result will be
given here for details see D.P. Flanagan and T.
Belytschko, (1981). To compute the
corrective term:
1. Define a series of ‘hourglass base
vectors’ which specify the displacements of the ath node in the ith hourglass mode. The 4
noded quadrilateral element has only one hourglass mode; the 8 noded brick has
4 modes, listed in the table.
2. Calculate the `hourglass shape
vectors’ for each mode as follows
where denotes the number of nodes on the element.
3. The modified stiffness matrix for the
element is written as
where denotes the volume of the element, and is a numerical parameter that controls the
stiffness of the hourglass resistance.
Taking where is the elastic shear modulus works well for
most applications. If is too large, it will seriously over-stiffen
the solid.
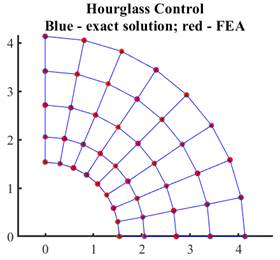
Sample code: Reduced
integration with hourglass control has been implemented in the sample Matlab
code Fem_hourglasscontrol.m. When run
with the input file volumetric_locking_demo.txt it produces the results shown
in the figure below. Hourglassing has clearly been satisfactorily eliminated.
HEALTH WARNING: Hourglass control is not completely effective: it can fail for finite
strain problems and can also cause problems in a dynamic analysis, where the
low stiffness of the hourglass modes can introduce spurious low frequency
vibration modes and low wave speeds.
8.6.3 Volumetric locking and ‘B-bar’
elements
The ‘B-bar’ method for small strains: Like
selective reduced integration, the B-bar method works by treating the
volumetric and deviatoric parts of the stiffness matrix separately. Instead of separating the volume integral
into two parts, however, the B-bar method modifies the definition of the strain
in the element. Its main advantage is
that the concept can easily be generalized to finite strain problems. Here, we will illustrate the method by
applying it to small-strain linear elasticity.
The procedure starts with the usual virtual work principle
In the B-bar method
1. We introduce a new variable to
characterize the volumetric strain in the elements. Define
where the integral is taken over the
volume of the element.
2. The strain in each element is replaced
by the approximation
3. Similarly, the virtual strain in each
element is replaced by
This means that the volumetric strain
in the element is everywhere equal to its mean value. The virtual work principle is then written in
terms of and as
Finally, introducing the finite
element interpolation and using the constitutive equation yields the usual
system of linear finite element equations, but with a modified element
stiffness matrix (and for nonlinear problems, a modified residual force vector). The
stiffness and element residual are assembled using the steps outlined in
Section 8.1.13, but with the following modifications:
1. Before calculating the stiffness
matrix, the volume average of the shape function derivatives must be
computed. This means an additional loop
over the integration points, calculating the spatial shape function derivatives
at each successive integration point (as in Step 1 of 8.1.13) and assembling
the sums
A reduced integration scheme is
usually sufficient. Once the sum has
been computed the volume average shape function derivatives follow as
2. The element stiffness matrix and
residual force vector are then assembled as before, except that the strain
vector and B matrix are modified to
with
The stress follows as and the element stiffness and residual force
are calculated using the usual expressions
The sums can be evaluated using a standard, full integration
scheme.
The B-bar method for small strains has
been implemented in the sample code or FEM_Bbar.m. The code can be run with the input file
volumetric_locking_demo.txt. Run the
code yourself to verify that the analytical and finite element solutions agree,
and there are no signs of hourglassing.
The ‘B-bar’ method for large strains: The B-bar
method can also be extended to finite deformations. As a representative application, we will use
it to solve the problem involving deformation of a hyperelastic material that
was discussed in Section 8.4. Most
hyperelastic materials have a large bulk modulus compared to their shear
modulus (and are often idealized as incompressible materials). As we have seen, it is important to design
elements carefully for this sort of material.
The simple implementation described Section 8.4 will suffer from
volumetric locking. The approach discussed below will resolve this problem.
As in the small strain B-bar method
the basic idea is to interpolate the volumetric and deviatoric strains
separately. In finite strain problems
we use the deformation gradient as the basic measure of deformation rather than
the strain; as you probably know, the Jacobian of the deformation gradient
quantifies volume changes. Accordingly,
the B-bar method for finite strains uses a modified measure of the Jacobian of
the deformation gradient. To this end:
1. We define the volume averaged
Jacobian of the deformation gradient
Here, the integral is taken over the
volume of the element in the reference configuration.
2. The deformation gradient is replaced
by an approximation , where n=2 for a 2D plane strain problem and n=3 for a 3D problem, while J=det(F).
3. The virtual work equation is
expressed in terms of this modified deformation gradient as
where is the Kirchhoff stress,
and
4. We now introduce the usual element
interpolation functions and calculate the deformation gradient and velocity
gradient as
5. As in the small-strain B-bar method
we introduce the volume averaged shape function derivatives
6. With these identities the discrete
equilibrium equation can be expressed as
7. The equilibrium equation is
nonlinear, and must be solved using Newton-Raphson iteration. This means
repeatedly solving
for the correction to the current approximation to the
displacement field. The stiffness follows
from linearizing the virtual work equation.
The resulting element stiffness is
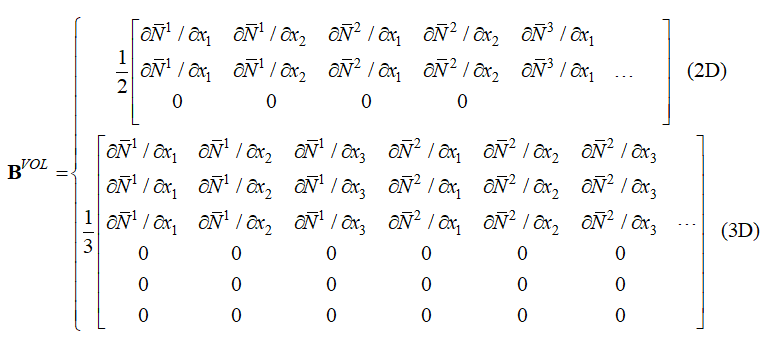
where
8. The element residual force and
stiffness can be re-written as matrix operations as follows:
where (for a 3D problem)

where as well as are the matrices of shape function derivatives
defined in Section 8.4.6, except that for finite strain problems in 8.4.6 must be replaced by . Similarly, matrices D and G are defined in 8.4.6, but must be calculated using the modified
deformation gradient .
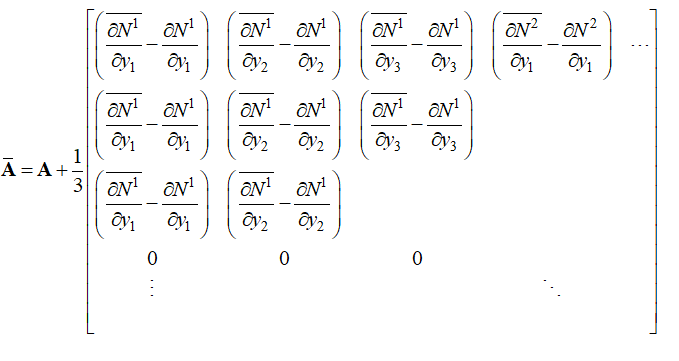
Finally
is a vector of shape function derivatives, and is the same quantity with replaced by .
The integrals may be evaluated with a full integration scheme.
Sample Code: The
B-bar method for finite strains has been implemented in the sample code or
FEM_bbar_hyperelastic.m. The code can be
run with the input file bbar_hypere_demo.txt.
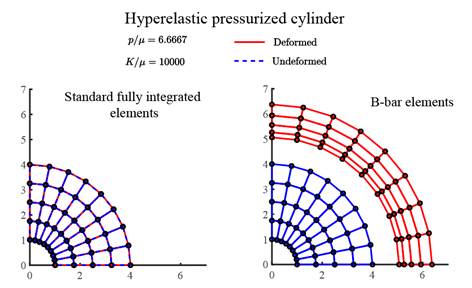
The file calculates the deformation of a long hollow cylinder with
internal radius a and external radius
b=4a as shown in the figure below. The solid is made from a modified neo-hookean
material described in Section 3.5 (see also Section 8.4), with shear modulus modulus
and bulk modulus .
The cylinder is loaded by an internal pressure and deforms in plane strain. The predicted deformation of the cylinder is
shown in the figure below. Results on
the right were obtained with the B-bar elements described in this section;
while those on the left were obtained with the standard fully integrated
isoparametric elements described in Section 8.4. The figure confirms that the B-bar element
successfully cures locking in the standard formulation.
8.6.4 Hybrid elements for modeling near-incompressible
materials
The bulk elastic modulus is infinite for a fully
incompressible material, which leads to an infinite stiffness matrix in the
standard finite element formulation (even if reduced integration is used to
avoid locking). This behavior can cause
the stiffness matrix for a nearly incompressible material to become
ill-conditioned, so that small rounding errors during the computation result in
large errors in the solution.
Hybrid elements are designed to avoid
this problem. They work by including the
hydrostatic stress distribution as an additional unknown variable, which must
be computed at the same time as the displacement field. This allows the stiff terms to be removed
from the system of finite element equations.
The procedure is illustrated most easily using isotropic linear
elasticity, but in practice hybrid elements are usually used to simulate
rubbers or metals subjected to large plastic strains.
Hybrid elements are based on a modified version of the
principle of virtual work, as follows. The virtual work equation (for small
strains) is re-written as
Here
1. is the deviatoric stress, determined from the
displacement field;
2. is the hydrostatic stress, again determined
from the displacement field;
3. p is an
additional degree of freedom that represents the (unknown) hydrostatic stress
in the solid;
4. is an arbitrary variation in the hydrostatic
stress;
5. is the bulk modulus of the solid.
The modified virtual work principle
states that, if the virtual work equation is satisfied for all kinematically
admissible variations in displacement and strain and all
possible variations in pressure , the stress field will satisfy the
equilibrium equations and traction boundary conditions, and the pressure
variable p will be equal to the
hydrostatic stress in the solid.
The finite element equations are
derived in the usual way
1. The displacement field, virtual
displacement field and position in the each element are interpolated using the
standard interpolation functions defined in Sections 8.1.9 and 8.1.10 as
2. Since the pressure is now an independent
variable, it must also be interpolated.
We write
where are a discrete set of pressure variables, is an arbitrary change in these pressure
variables, are a set of interpolation functions for the
pressure, and is the number of pressure variables associated
with the element. The pressure need not
be continuous across neighboring elements, so that independent pressure
variables can be added to each element.
The following schemes are usually used
a. In linear elements (the 3 noded
triangle, 4 noded quadrilateral, 5 noded tetrahedron or 8 noded brick) the
pressure is constant. The pressure is defined by its value at the
centroid of each element, and the interpolation functions are constant.
b. In quadratic elements (6 noded
triangle, 8 noded quadrilateral, 10 noded tetrahedron or 20 noded brick) the
pressure varies linearly in the element.
Its value can be defined by the pressure at the corners of each element,
and interpolated using the standard linear interpolation functions.
3. For an isotropic, linear elastic
solid with shear modulus and Poisson ratio the deviatoric stress is related to the
displacement field by , while the hydrostatic stress is , where is the bulk modulus.
4. Substituting the linear elastic
equations and the finite element interpolation functions into the virtual work
principle leads to a system of equations for the unknown displacements and pressures of the form
where the global stiffness matrices are obtained by summing the following element
stiffness matrices
and the force F is defined in the usual way.
These formulas can easily be re-written as matrix operations, but the
details are left as an exercise. The
integrals defining may be evaluated using the full integration
scheme or reduced integration (hourglass control may be required in this
case). The remaining integrals must be
evaluated using reduced integration to avoid element locking.
5. Note that, although the pressure
variables are local to the elements, they cannot be eliminated from the element
stiffness matrix, since doing so would reduce the element stiffness matrix to
the usual, non-hybrid form.
Consequently, hybrid elements increase the cost of storing and solving
the system of equations.
8.6.5 Example hybrid FEM code
As always, we provide simple example FEM codes to illustrate
actual implementation. The codes can be
downloaded from
https://github.com/albower/Applied_Mechanics_of_Solids
The code is in a file named
FEM_hybrid.m. It should be run with the
input file volumetric_locking_demo_linear.txt.
The code solves the pressurized cylinder problem discussed in Section
8.6.2. Run the code for yourself to
check that hybrid elements give correct predictions even for fully
incompressible materials.
